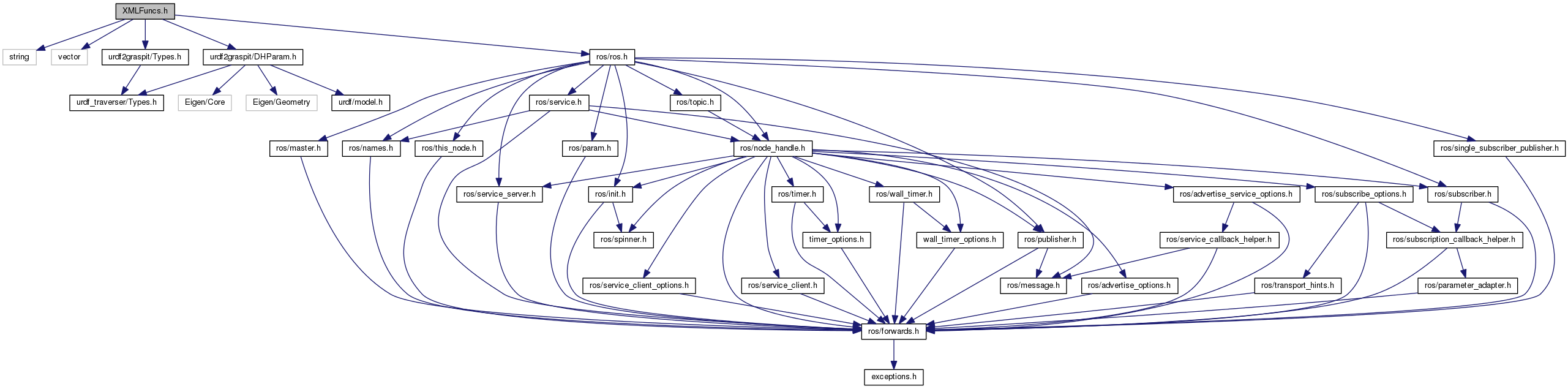
#include <string>#include <vector>#include <urdf2graspit/Types.h>#include <urdf2graspit/DHParam.h>#include <ros/ros.h>
Include dependency graph for XMLFuncs.h:
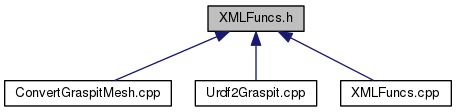
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | urdf2graspit::xmlfuncs::FingerChain |
| A chain of links joined by joints, described in DH parameters. More... | |
Namespaces | |
| namespace | urdf2graspit |
| namespace | urdf2graspit::xmlfuncs |
Functions | |
| std::string | urdf2graspit::xmlfuncs::getDOF (float defaultVel, float maxEffort, float kp=1e+9, float kd=1e+7, float draggerScale=20, const std::string &type="r") |
| std::string | urdf2graspit::xmlfuncs::getEigenGraspXML (const std::vector< DHParam > &dhparams, bool negateJointValues) |
| std::string | urdf2graspit::xmlfuncs::getFingerChain (const FingerChain &c, const Eigen::Vector3d &palmTranslation, const Eigen::Quaterniond &palmRotation, bool negateJointValues) |
| std::string | urdf2graspit::xmlfuncs::getLinkDescXML (const LinkPtr &link, const std::string &mesh_output_extension, const std::string &material="plastic") |
| std::string | urdf2graspit::xmlfuncs::getWorldFileTemplate (const std::string &robotName, const std::vector< DHParam > &dhparams, const std::string &worldFilePathRelToGraspitRoot, bool negateJointValues) |