#include <vector>#include <Eigen/Dense>
Include dependency graph for state.h:
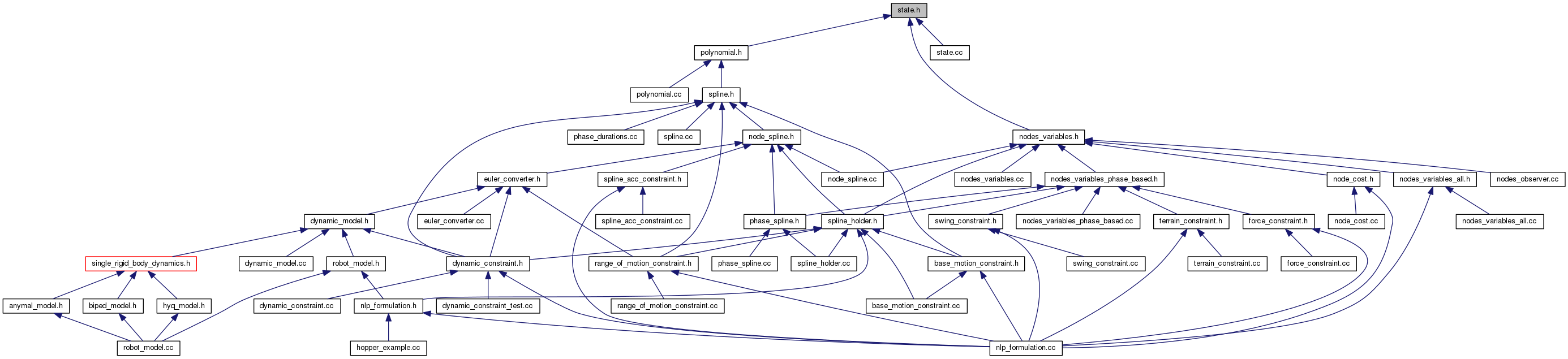
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| struct | towr::BaseState |
| Can represent the 6Degree-of-Freedom floating base of a robot. More... | |
| class | towr::Node |
| A node represents the state of a trajectory at a specific time. More... | |
| class | towr::State |
| Stores at state comprised of values and higher-order derivatives. More... | |
Namespaces | |
| namespace | towr |
Enumerations | |
| enum | towr::Dx { towr::kPos = 0, towr::kVel, towr::kAcc, towr::kJerk } |
| < the values or derivative. For motions e.g. position, velocity, ... More... | |