#include <ros/console.h>#include <ros/ros.h>#include <Eigen/Core>#include <Eigen/StdVector>#include <teb_local_planner/TebLocalPlannerReconfigureConfig.h>
Include dependency graph for teb_config.h:

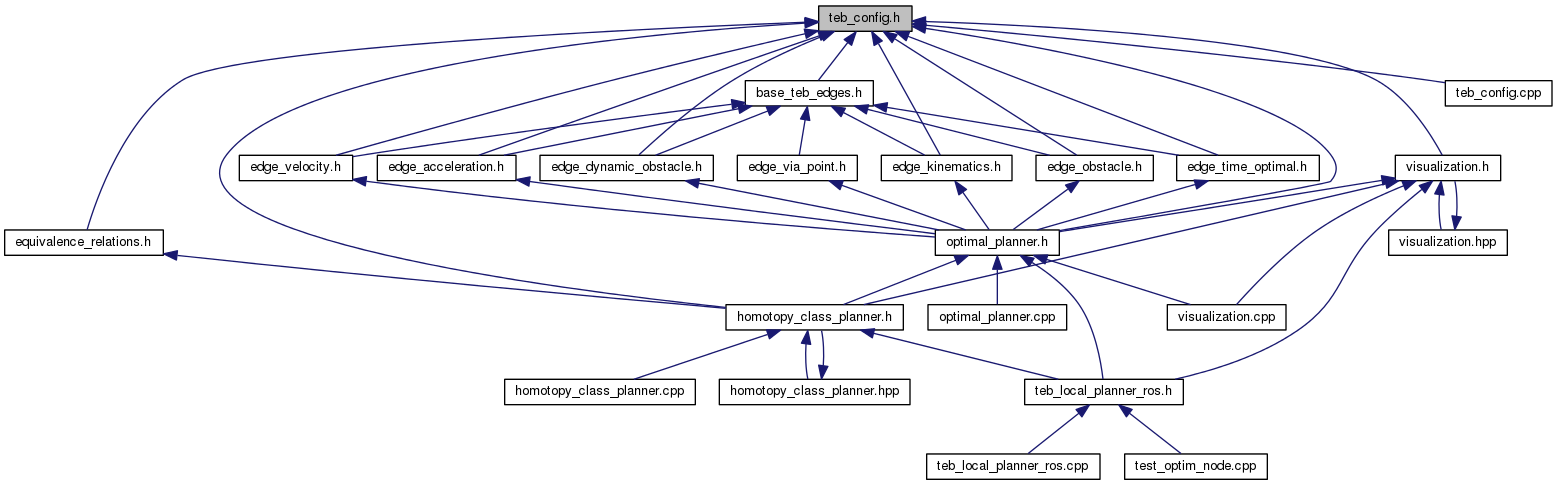
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| struct | teb_local_planner::TebConfig::GoalTolerance |
| Goal tolerance related parameters. More... | |
| struct | teb_local_planner::TebConfig::HomotopyClasses |
| struct | teb_local_planner::TebConfig::Obstacles |
| Obstacle related parameters. More... | |
| struct | teb_local_planner::TebConfig::Optimization |
| Optimization related parameters. More... | |
| struct | teb_local_planner::TebConfig::Robot |
| Robot related parameters. More... | |
| class | teb_local_planner::TebConfig |
| Config class for the teb_local_planner and its components. More... | |
| struct | teb_local_planner::TebConfig::Trajectory |
| Trajectory related parameters. More... | |
Namespaces | |
| namespace | teb_local_planner |
Defines | |
| #define | USE_ANALYTIC_JACOBI |
Define Documentation
| #define USE_ANALYTIC_JACOBI |
Definition at line 51 of file teb_config.h.