#include <string.h>#include <stdio.h>#include "amb_kf.h"#include "stupid_filter.h"#include "single_diff.h"#include "dgnss_management.h"#include "linear_algebra.h"#include "ambiguity_test.h"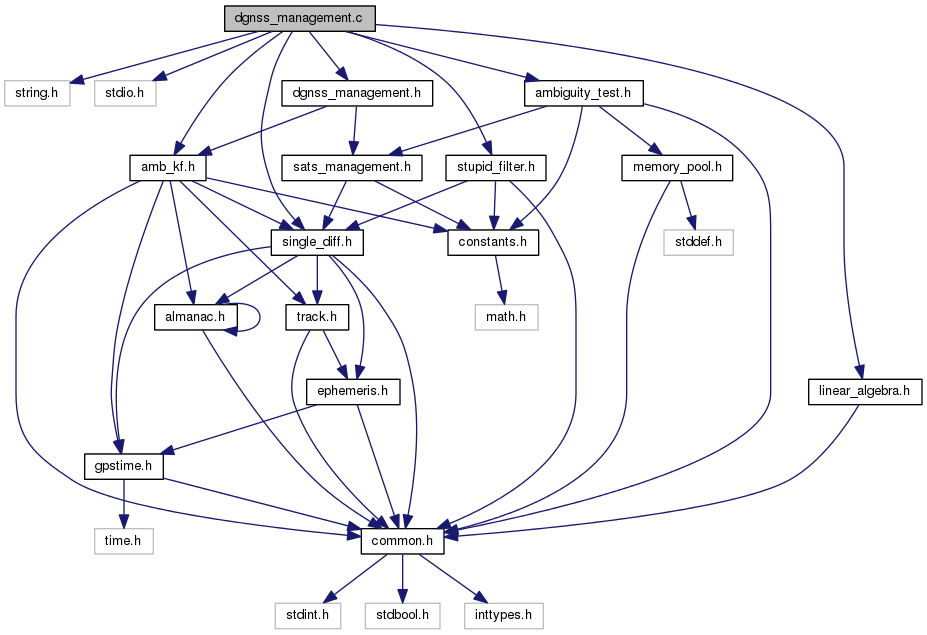
Go to the source code of this file.
Defines | |
| #define | DEBUG_DGNSS_MANAGEMENT 0 |
Functions | |
| s8 | _dgnss_low_latency_float_baseline (u8 num_sdiffs, sdiff_t *sdiffs, double ref_ecef[3], u8 *num_used, double b[3]) |
| s8 | _dgnss_low_latency_IAR_baseline (u8 num_sdiffs, sdiff_t *sdiffs, double ref_ecef[3], u8 *num_used, double b[3]) |
| void | dgnss_fixed_baseline (u8 n, sdiff_t *sdiffs, double ref_ecef[3], u8 *num_used, double b[3]) |
| s8 | dgnss_fixed_baseline2 (u8 num_sdiffs, sdiff_t *sdiffs, double ref_ecef[3], u8 *num_used, double b[3]) |
| s8 | dgnss_iar_get_single_hyp (double *dhyp) |
| u8 | dgnss_iar_MLE_ambs (s32 *ambs) |
| u32 | dgnss_iar_num_hyps (void) |
| u32 | dgnss_iar_num_sats (void) |
| u8 | dgnss_iar_pool_contains (double *ambs) |
| s8 | dgnss_iar_resolved () |
| void | dgnss_incorporate_observation (sdiff_t *sdiffs, double *dd_measurements, double *reciever_ecef) |
| void | dgnss_init (u8 num_sats, sdiff_t *sdiffs, double reciever_ecef[3]) |
| void | dgnss_init_known_baseline (u8 num_sats, sdiff_t *sdiffs, double receiver_ecef[3], double b[3]) |
| void | dgnss_init_known_baseline2 (u8 num_sats, sdiff_t *sdiffs, double receiver_ecef[3], double b[3]) |
| u8 | dgnss_intersect_sats (u8 num_old_prns, u8 *old_prns, u8 num_sdiffs, sdiff_t *sdiffs, u8 *ndx_of_intersection_in_old, u8 *ndx_of_intersection_in_new) |
| s8 | dgnss_low_latency_baseline (u8 num_sdiffs, sdiff_t *sdiffs, double ref_ecef[3], u8 *num_used, double b[3]) |
| void | dgnss_new_float_baseline (u8 num_sats, sdiff_t *sdiffs, double receiver_ecef[3], u8 *num_used, double b[3]) |
| void | dgnss_rebase_ref (u8 num_sdiffs, sdiff_t *sdiffs, double reciever_ecef[3], u8 old_prns[MAX_CHANNELS], sdiff_t *corrected_sdiffs) |
| void | dgnss_reset_iar () |
| void | dgnss_set_settings (double phase_var_test, double code_var_test, double phase_var_kf, double code_var_kf, double amb_drift_var, double amb_init_var, double new_int_var) |
| void | dgnss_start_over (u8 num_sats, sdiff_t *sdiffs, double reciever_ecef[3]) |
| void | dgnss_update (u8 num_sats, sdiff_t *sdiffs, double reciever_ecef[3]) |
| void | dgnss_update_sats (u8 num_sdiffs, double reciever_ecef[3], sdiff_t *sdiffs_with_ref_first, double *dd_measurements) |
| void | dvec_printf (double *v, u32 n) |
| u8 | get_amb_kf_cov (double *cov) |
| u8 | get_amb_kf_de_and_phase (u8 num_sdiffs, sdiff_t *sdiffs, double ref_ecef[3], double *de, double *phase) |
| u8 | get_amb_kf_mean (double *ambs) |
| u8 | get_amb_kf_prns (u8 *prns) |
| u8 | get_amb_test_prns (u8 *prns) |
| u8 | get_de_and_phase (sats_management_t *sats_man, u8 num_sdiffs, sdiff_t *sdiffs, double ref_ecef[3], double *de, double *phase) |
| nkf_t * | get_dgnss_nkf () |
| u8 | get_iar_de_and_phase (u8 num_sdiffs, sdiff_t *sdiffs, double ref_ecef[3], double *de, double *phase) |
| sats_management_t * | get_sats_management () |
| s32 * | get_stupid_filter_ints () |
| double | l2_dist (double x1[3], double x2[3]) |
| s8 | make_float_dd_measurements_and_sdiffs (u8 num_sdiffs, sdiff_t *sdiffs, double *float_dd_measurements, sdiff_t *float_sdiffs) |
| void | make_measurements (u8 num_double_diffs, sdiff_t *sdiffs, double *raw_measurements) |
| void | measure_amb_kf_b (double reciever_ecef[3], u8 num_sdiffs, sdiff_t *sdiffs, double *b) |
| void | measure_b_with_external_ambs (double reciever_ecef[3], u8 num_sdiffs, sdiff_t *sdiffs, double *ambs, double *b) |
| void | measure_iar_b_with_external_ambs (double reciever_ecef[3], u8 num_sdiffs, sdiff_t *sdiffs, double *ambs, double *b) |
| void | normalize (double x[3]) |
| bool | prns_match (u8 *old_non_ref_prns, u8 num_non_ref_sdiffs, sdiff_t *non_ref_sdiffs) |
| void | sdiffs_to_prns (u8 n, sdiff_t *sdiffs, u8 *prns) |
Variables | |
| ambiguity_test_t | ambiguity_test |
| dgnss_settings_t | dgnss_settings |
| nkf_t | nkf |
| sats_management_t | sats_management |
| stupid_filter_state_t | stupid_state |
Define Documentation
| #define DEBUG_DGNSS_MANAGEMENT 0 |
Definition at line 22 of file dgnss_management.c.
Function Documentation
| s8 _dgnss_low_latency_float_baseline | ( | u8 | num_sdiffs, |
| sdiff_t * | sdiffs, | ||
| double | ref_ecef[3], | ||
| u8 * | num_used, | ||
| double | b[3] | ||
| ) |
Constructs a low latency float baseline measurement. The sdiffs have no particular reason (other than a general tendency brought by hysteresis) to match up with the float filter's sats, so we have to check if we can solve. For now, unless the sdiffs are a superset of the float sats, we don't solve.
solve whenever the information is there.
since we're now using make_dd_measurements_and_sdiffs outside of the amb_test context, pull it into another file.
pull this function into the KF, once we pull the sats_management struct into the KF too. When we do, do the same for the IAR low lat solution.
- Parameters:
-
num_sdiffs The number of sdiffs input. sdiffs The sdiffs used to measure. (These should be a superset of the float sats). ref_ecef The reference position used for solving, and making observation matrices. num_used The number of sats actually used to compute the baseline. b The baseline computed.
- Returns:
- -1 if it can't solve. 0 If it can solve.
Definition at line 532 of file dgnss_management.c.
| s8 _dgnss_low_latency_IAR_baseline | ( | u8 | num_sdiffs, |
| sdiff_t * | sdiffs, | ||
| double | ref_ecef[3], | ||
| u8 * | num_used, | ||
| double | b[3] | ||
| ) |
Constructs a low latency IAR resolved baseline measurement. The sdiffs have no particular reason (other than a general tendency brought by hysteresis) to match up with the IAR sats, so we have to check if we can solve. For now, unless the sdiffs are a superset of the IAR sats, we don't solve.
, solve whenever we can
since we're now using make_dd_measurements_and_sdiffs outside of the amb_test context, pull it into another file.
pull this into the IAR file when we do the same for the float low lat solution.
- Parameters:
-
num_sdiffs The number of sdiffs input. sdiffs The sdiffs used to measure. (These should be a superset of the float sats). ref_ecef The reference position used for solving, and making observation matrices. num_used The number of sats actually used to compute the baseline. b The baseline computed.
- Returns:
- -1 if it can't solve. 0 If it can solve.
Definition at line 589 of file dgnss_management.c.
| void dgnss_fixed_baseline | ( | u8 | n, |
| sdiff_t * | sdiffs, | ||
| double | ref_ecef[3], | ||
| u8 * | num_used, | ||
| double | b[3] | ||
| ) |
Definition at line 428 of file dgnss_management.c.
| s8 dgnss_fixed_baseline2 | ( | u8 | num_sdiffs, |
| sdiff_t * | sdiffs, | ||
| double | ref_ecef[3], | ||
| u8 * | num_used, | ||
| double | b[3] | ||
| ) |
Definition at line 450 of file dgnss_management.c.
| s8 dgnss_iar_get_single_hyp | ( | double * | dhyp | ) |
Definition at line 394 of file dgnss_management.c.
| u8 dgnss_iar_MLE_ambs | ( | s32 * | ambs | ) |
Definition at line 1013 of file dgnss_management.c.
| u32 dgnss_iar_num_hyps | ( | void | ) |
Definition at line 380 of file dgnss_management.c.
| u32 dgnss_iar_num_sats | ( | void | ) |
Definition at line 389 of file dgnss_management.c.
| u8 dgnss_iar_pool_contains | ( | double * | ambs | ) |
Definition at line 1008 of file dgnss_management.c.
| s8 dgnss_iar_resolved | ( | void | ) |
Definition at line 1003 of file dgnss_management.c.
| void dgnss_incorporate_observation | ( | sdiff_t * | sdiffs, |
| double * | dd_measurements, | ||
| double * | reciever_ecef | ||
| ) |
Definition at line 261 of file dgnss_management.c.
| void dgnss_init | ( | u8 | num_sats, |
| sdiff_t * | sdiffs, | ||
| double | reciever_ecef[3] | ||
| ) |
Definition at line 108 of file dgnss_management.c.
| void dgnss_init_known_baseline | ( | u8 | num_sats, |
| sdiff_t * | sdiffs, | ||
| double | receiver_ecef[3], | ||
| double | b[3] | ||
| ) |
Definition at line 679 of file dgnss_management.c.
| void dgnss_init_known_baseline2 | ( | u8 | num_sats, |
| sdiff_t * | sdiffs, | ||
| double | receiver_ecef[3], | ||
| double | b[3] | ||
| ) |
Definition at line 733 of file dgnss_management.c.
| u8 dgnss_intersect_sats | ( | u8 | num_old_prns, |
| u8 * | old_prns, | ||
| u8 | num_sdiffs, | ||
| sdiff_t * | sdiffs, | ||
| u8 * | ndx_of_intersection_in_old, | ||
| u8 * | ndx_of_intersection_in_new | ||
| ) |
Finds the prns of the intersection between old prns and new measurements. It returns the length of the intersection
Definition at line 87 of file dgnss_management.c.
| s8 dgnss_low_latency_baseline | ( | u8 | num_sdiffs, |
| sdiff_t * | sdiffs, | ||
| double | ref_ecef[3], | ||
| u8 * | num_used, | ||
| double | b[3] | ||
| ) |
Finds the baseline using low latency sdiffs. The low latency sdiffs are not guaranteed to match up with either the amb_test's or the float sdiffs, and thus care must be taken to transform them accordingly and check their availability in those sat sets.
- Parameters:
-
num_sdiffs The number of low-latency sdiffs provided. sdiffs The low-latency sdiffs. ref_ecef The referece position for the baseline. (TODO is this the local or remote receiver position?) num_used Output number of sdiffs actually used in the baseline estimate. b Output baseline.
- Returns:
- 1 if we are using an IAR resolved baseline. 2 if we are using a float baseline. -1 if we can't give a baseline.
Definition at line 643 of file dgnss_management.c.
| void dgnss_new_float_baseline | ( | u8 | num_sats, |
| sdiff_t * | sdiffs, | ||
| double | receiver_ecef[3], | ||
| u8 * | num_used, | ||
| double | b[3] | ||
| ) |
Definition at line 405 of file dgnss_management.c.
| void dgnss_rebase_ref | ( | u8 | num_sdiffs, |
| sdiff_t * | sdiffs, | ||
| double | reciever_ecef[3], | ||
| u8 | old_prns[MAX_CHANNELS], | ||
| sdiff_t * | corrected_sdiffs | ||
| ) |
Definition at line 174 of file dgnss_management.c.
| void dgnss_reset_iar | ( | void | ) |
Definition at line 673 of file dgnss_management.c.
| void dgnss_set_settings | ( | double | phase_var_test, |
| double | code_var_test, | ||
| double | phase_var_kf, | ||
| double | code_var_kf, | ||
| double | amb_drift_var, | ||
| double | amb_init_var, | ||
| double | new_int_var | ||
| ) |
Definition at line 39 of file dgnss_management.c.
| void dgnss_start_over | ( | u8 | num_sats, |
| sdiff_t * | sdiffs, | ||
| double | reciever_ecef[3] | ||
| ) |
Definition at line 141 of file dgnss_management.c.
| void dgnss_update | ( | u8 | num_sats, |
| sdiff_t * | sdiffs, | ||
| double | reciever_ecef[3] | ||
| ) |
Definition at line 295 of file dgnss_management.c.
| void dgnss_update_sats | ( | u8 | num_sdiffs, |
| double | reciever_ecef[3], | ||
| sdiff_t * | sdiffs_with_ref_first, | ||
| double * | dd_measurements | ||
| ) |
Definition at line 203 of file dgnss_management.c.
| void dvec_printf | ( | double * | v, |
| u32 | n | ||
| ) |
Definition at line 289 of file dgnss_management.c.
| u8 get_amb_kf_cov | ( | double * | cov | ) |
Definition at line 984 of file dgnss_management.c.
| u8 get_amb_kf_de_and_phase | ( | u8 | num_sdiffs, |
| sdiff_t * | sdiffs, | ||
| double | ref_ecef[3], | ||
| double * | de, | ||
| double * | phase | ||
| ) |
Definition at line 957 of file dgnss_management.c.
| u8 get_amb_kf_mean | ( | double * | ambs | ) |
Definition at line 977 of file dgnss_management.c.
| u8 get_amb_kf_prns | ( | u8 * | prns | ) |
Definition at line 991 of file dgnss_management.c.
| u8 get_amb_test_prns | ( | u8 * | prns | ) |
Definition at line 997 of file dgnss_management.c.
| u8 get_de_and_phase | ( | sats_management_t * | sats_man, |
| u8 | num_sdiffs, | ||
| sdiff_t * | sdiffs, | ||
| double | ref_ecef[3], | ||
| double * | de, | ||
| double * | phase | ||
| ) |
Definition at line 909 of file dgnss_management.c.
| nkf_t* get_dgnss_nkf | ( | void | ) |
Definition at line 1019 of file dgnss_management.c.
| u8 get_iar_de_and_phase | ( | u8 | num_sdiffs, |
| sdiff_t * | sdiffs, | ||
| double | ref_ecef[3], | ||
| double * | de, | ||
| double * | phase | ||
| ) |
Definition at line 967 of file dgnss_management.c.
| sats_management_t* get_sats_management | ( | void | ) |
Definition at line 1029 of file dgnss_management.c.
| s32* get_stupid_filter_ints | ( | void | ) |
Definition at line 1024 of file dgnss_management.c.
| double l2_dist | ( | double | x1[3], |
| double | x2[3] | ||
| ) |
Definition at line 792 of file dgnss_management.c.
| s8 make_float_dd_measurements_and_sdiffs | ( | u8 | num_sdiffs, |
| sdiff_t * | sdiffs, | ||
| double * | float_dd_measurements, | ||
| sdiff_t * | float_sdiffs | ||
| ) |
Makes DD measurement vector and sdiffs to match KF If given a set of sdiffs which is a superset of the KF's sdiffs, this function finds the subset of sdiffs matching the KF sats, and outputs it with the reference first.
since we're now using make_dd_measurements_and_sdiffs outside of the amb_test context, pull it into another file.
- Returns:
- 0 if input sdiffs are superset of KF sats. -1 otherwise.
Definition at line 493 of file dgnss_management.c.
| void make_measurements | ( | u8 | num_double_diffs, |
| sdiff_t * | sdiffs, | ||
| double * | raw_measurements | ||
| ) |
Definition at line 53 of file dgnss_management.c.
| void measure_amb_kf_b | ( | double | reciever_ecef[3], |
| u8 | num_sdiffs, | ||
| sdiff_t * | sdiffs, | ||
| double * | b | ||
| ) |
Definition at line 810 of file dgnss_management.c.
| void measure_b_with_external_ambs | ( | double | reciever_ecef[3], |
| u8 | num_sdiffs, | ||
| sdiff_t * | sdiffs, | ||
| double * | ambs, | ||
| double * | b | ||
| ) |
Definition at line 844 of file dgnss_management.c.
| void measure_iar_b_with_external_ambs | ( | double | reciever_ecef[3], |
| u8 | num_sdiffs, | ||
| sdiff_t * | sdiffs, | ||
| double * | ambs, | ||
| double * | b | ||
| ) |
Definition at line 878 of file dgnss_management.c.
| void normalize | ( | double | x[3] | ) |
Definition at line 802 of file dgnss_management.c.
| bool prns_match | ( | u8 * | old_non_ref_prns, |
| u8 | num_non_ref_sdiffs, | ||
| sdiff_t * | non_ref_sdiffs | ||
| ) |
Definition at line 69 of file dgnss_management.c.
| void sdiffs_to_prns | ( | u8 | n, |
| sdiff_t * | sdiffs, | ||
| u8 * | prns | ||
| ) |
Definition at line 196 of file dgnss_management.c.
Variable Documentation
Definition at line 27 of file dgnss_management.c.
{
.phase_var_test = DEFAULT_PHASE_VAR_TEST,
.code_var_test = DEFAULT_CODE_VAR_TEST,
.phase_var_kf = DEFAULT_PHASE_VAR_KF,
.code_var_kf = DEFAULT_CODE_VAR_KF,
.amb_drift_var = DEFAULT_AMB_DRIFT_VAR,
.amb_init_var = DEFAULT_AMB_INIT_VAR,
.new_int_var = DEFAULT_NEW_INT_VAR,
}
Definition at line 29 of file dgnss_management.c.
Definition at line 24 of file dgnss_management.c.
Definition at line 26 of file dgnss_management.c.
Definition at line 25 of file dgnss_management.c.