Defines the SickLMS1xx class for working with the Sick LMS1xx laser range finders. More...
#include <string>#include <arpa/inet.h>#include "SickLIDAR.hh"#include "SickLMS1xxBufferMonitor.hh"#include "SickLMS1xxMessage.hh"#include "SickException.hh"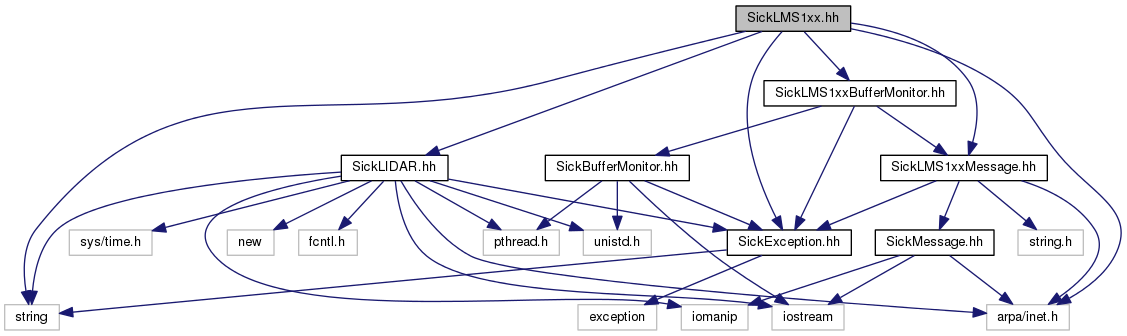
Go to the source code of this file.
Classes | |
| struct | SickToolbox::SickLMS1xx::sick_lms_1xx_scan_config_tag |
| A structure for aggregrating the Sick LMS 1xx configuration params. More... | |
| class | SickToolbox::SickLMS1xx |
| Provides a simple driver interface for working with the Sick LD-OEM/Sick LD-LRS long-range models via Ethernet. More... | |
Namespaces | |
| namespace | SickToolbox |
Encapsulates the Sick LIDAR Matlab/C++ toolbox. | |
Defines | |
| #define | DEFAULT_SICK_LMS_1XX_CONNECT_TIMEOUT (1000000) |
| Max time for establishing connection (usecs) | |
| #define | DEFAULT_SICK_LMS_1XX_IP_ADDRESS "192.168.0.1" |
| Default IP Address. | |
| #define | DEFAULT_SICK_LMS_1XX_MESSAGE_TIMEOUT (5000000) |
| Max time for reply (usecs) | |
| #define | DEFAULT_SICK_LMS_1XX_STATUS_TIMEOUT (60000000) |
| Max time it should take to change status. | |
| #define | DEFAULT_SICK_LMS_1XX_TCP_PORT (2111) |
| Sick LMS 1xx TCP/IP Port. | |
| #define | SICK_LMS_1XX_SCAN_AREA_MAX_ANGLE (2250000) |
| 225 degrees (1/10000) degree | |
| #define | SICK_LMS_1XX_SCAN_AREA_MIN_ANGLE (-450000) |
Typedefs | |
| typedef SickLMS1xx::sick_lms_1xx_scan_format_t | SickToolbox::sick_lms_1xx_scan_format_t |
| Makes working w/ SickLMS1xx::sick_lms_1xx_scan_format_t a bit easier. | |
| typedef SickLMS1xx::sick_lms_1xx_scan_freq_t | SickToolbox::sick_lms_1xx_scan_freq_t |
| Makes working w/ SickLMS1xx::sick_lms_1xx_scan_freq_t a bit easier. | |
| typedef SickLMS1xx::sick_lms_1xx_scan_res_t | SickToolbox::sick_lms_1xx_scan_res_t |
| Makes working w/ SickLMS1xx::sick_lms_1xx_scan_res_t a bit easier. | |
| typedef SickLMS1xx::sick_lms_1xx_status_t | SickToolbox::sick_lms_1xx_status_t |
| Makes working w/ SickLMS1xx::sick_lms_1xx_status_t a bit easier. | |
Detailed Description
Defines the SickLMS1xx class for working with the Sick LMS1xx laser range finders.
Code by Jason C. Derenick and Christopher R. Mansley. Contact jasonder(at)seas(dot)upenn(dot)edu
The Sick LIDAR Matlab/C++ Toolbox Copyright (c) 2008, Jason C. Derenick and Thomas H. Miller All rights reserved.
This software is released under a BSD Open-Source License. See http://sicktoolbox.sourceforge.net
Definition in file SickLMS1xx.hh.
Define Documentation
| #define DEFAULT_SICK_LMS_1XX_CONNECT_TIMEOUT (1000000) |
Max time for establishing connection (usecs)
Definition at line 23 of file SickLMS1xx.hh.
| #define DEFAULT_SICK_LMS_1XX_IP_ADDRESS "192.168.0.1" |
Default IP Address.
Definition at line 21 of file SickLMS1xx.hh.
| #define DEFAULT_SICK_LMS_1XX_MESSAGE_TIMEOUT (5000000) |
Max time for reply (usecs)
Definition at line 24 of file SickLMS1xx.hh.
| #define DEFAULT_SICK_LMS_1XX_STATUS_TIMEOUT (60000000) |
Max time it should take to change status.
Definition at line 25 of file SickLMS1xx.hh.
| #define DEFAULT_SICK_LMS_1XX_TCP_PORT (2111) |
Sick LMS 1xx TCP/IP Port.
Definition at line 22 of file SickLMS1xx.hh.
| #define SICK_LMS_1XX_SCAN_AREA_MAX_ANGLE (2250000) |
225 degrees (1/10000) degree
Definition at line 28 of file SickLMS1xx.hh.
| #define SICK_LMS_1XX_SCAN_AREA_MIN_ANGLE (-450000) |
-45 degrees (1/10000) degree
Definition at line 27 of file SickLMS1xx.hh.