Public Member Functions | |
| ICPOdometry () | |
| virtual | ~ICPOdometry () |
Protected Member Functions | |
| virtual void | flushCallbacks () |
Private Member Functions | |
| void | callbackCloud (const sensor_msgs::PointCloud2ConstPtr &cloudMsg) |
| void | callbackScan (const sensor_msgs::LaserScanConstPtr &scanMsg) |
| virtual void | onOdomInit () |
| virtual void | updateParameters (ParametersMap ¶meters) |
Private Attributes | |
| ros::Subscriber | cloud_sub_ |
| ros::Subscriber | scan_sub_ |
| int | scanCloudMaxPoints_ |
| int | scanDownsamplingStep_ |
| int | scanNormalK_ |
| double | scanNormalRadius_ |
| double | scanVoxelSize_ |
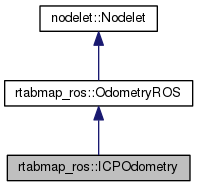
Detailed Description
Definition at line 55 of file icp_odometry.cpp.
Constructor & Destructor Documentation
| rtabmap_ros::ICPOdometry::ICPOdometry | ( | ) | [inline] |
Definition at line 58 of file icp_odometry.cpp.
| virtual rtabmap_ros::ICPOdometry::~ICPOdometry | ( | ) | [inline, virtual] |
Definition at line 68 of file icp_odometry.cpp.
Member Function Documentation
| void rtabmap_ros::ICPOdometry::callbackCloud | ( | const sensor_msgs::PointCloud2ConstPtr & | cloudMsg | ) | [inline, private] |
Definition at line 245 of file icp_odometry.cpp.
| void rtabmap_ros::ICPOdometry::callbackScan | ( | const sensor_msgs::LaserScanConstPtr & | scanMsg | ) | [inline, private] |
Definition at line 176 of file icp_odometry.cpp.
| virtual void rtabmap_ros::ICPOdometry::flushCallbacks | ( | ) | [inline, protected, virtual] |
Implements rtabmap_ros::OdometryROS.
Definition at line 330 of file icp_odometry.cpp.
| virtual void rtabmap_ros::ICPOdometry::onOdomInit | ( | ) | [inline, private, virtual] |
Implements rtabmap_ros::OdometryROS.
Definition at line 74 of file icp_odometry.cpp.
| virtual void rtabmap_ros::ICPOdometry::updateParameters | ( | ParametersMap & | parameters | ) | [inline, private, virtual] |
Definition at line 101 of file icp_odometry.cpp.
Member Data Documentation
Definition at line 337 of file icp_odometry.cpp.
Definition at line 336 of file icp_odometry.cpp.
int rtabmap_ros::ICPOdometry::scanCloudMaxPoints_ [private] |
Definition at line 338 of file icp_odometry.cpp.
int rtabmap_ros::ICPOdometry::scanDownsamplingStep_ [private] |
Definition at line 339 of file icp_odometry.cpp.
int rtabmap_ros::ICPOdometry::scanNormalK_ [private] |
Definition at line 341 of file icp_odometry.cpp.
double rtabmap_ros::ICPOdometry::scanNormalRadius_ [private] |
Definition at line 342 of file icp_odometry.cpp.
double rtabmap_ros::ICPOdometry::scanVoxelSize_ [private] |
Definition at line 340 of file icp_odometry.cpp.
The documentation for this class was generated from the following file: