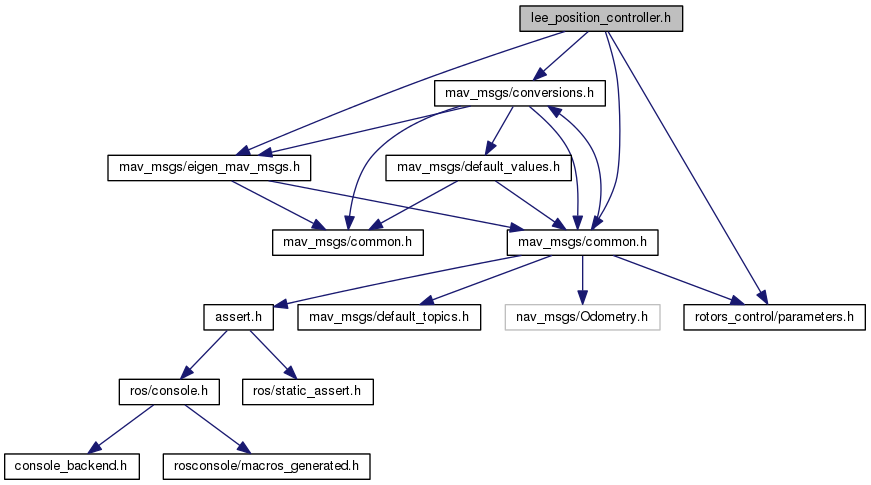
#include <mav_msgs/conversions.h>#include <mav_msgs/eigen_mav_msgs.h>#include "rotors_control/common.h"#include "rotors_control/parameters.h"
Include dependency graph for lee_position_controller.h:
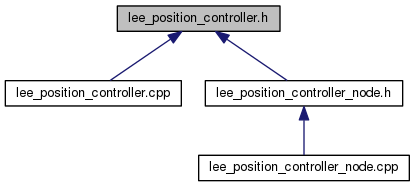
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | rotors_control::LeePositionController |
| class | rotors_control::LeePositionControllerParameters |
Namespaces | |
| namespace | rotors_control |
Variables | |
| static const Eigen::Vector3d | rotors_control::kDefaultAngularRateGain = Eigen::Vector3d(0.52, 0.52, 0.025) |
| static const Eigen::Vector3d | rotors_control::kDefaultAttitudeGain = Eigen::Vector3d(3, 3, 0.035) |
| static const Eigen::Vector3d | rotors_control::kDefaultPositionGain = Eigen::Vector3d(6, 6, 6) |
| static const Eigen::Vector3d | rotors_control::kDefaultVelocityGain = Eigen::Vector3d(4.7, 4.7, 4.7) |