#include <assert.h>#include <mav_msgs/conversions.h>#include <mav_msgs/default_topics.h>#include <nav_msgs/Odometry.h>#include "rotors_control/parameters.h"
Include dependency graph for common.h:
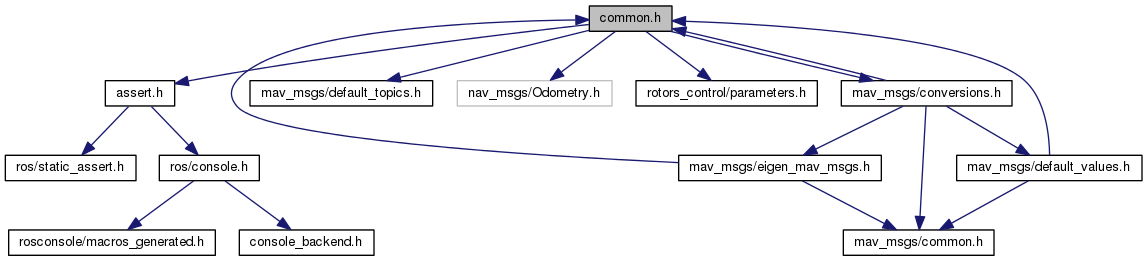
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Classes | |
| struct | rotors_control::EigenOdometry |
Namespaces | |
| namespace | rotors_control |
Functions | |
| void | rotors_control::calculateAllocationMatrix (const RotorConfiguration &rotor_configuration, Eigen::Matrix4Xd *allocation_matrix) |
| void | rotors_control::eigenOdometryFromMsg (const nav_msgs::OdometryConstPtr &msg, EigenOdometry *odometry) |
| void | rotors_control::skewMatrixFromVector (Eigen::Vector3d &vector, Eigen::Matrix3d *skew_matrix) |
| void | rotors_control::vectorFromSkewMatrix (Eigen::Matrix3d &skew_matrix, Eigen::Vector3d *vector) |
Variables | |
| static const std::string | rotors_control::kDefaultCommandMotorSpeedTopic |
| static const std::string | rotors_control::kDefaultCommandMultiDofJointTrajectoryTopic |
| static const std::string | rotors_control::kDefaultCommandRollPitchYawrateThrustTopic |
| static const std::string | rotors_control::kDefaultImuTopic |
| static const std::string | rotors_control::kDefaultNamespace = "" |
| static const std::string | rotors_control::kDefaultOdometryTopic |