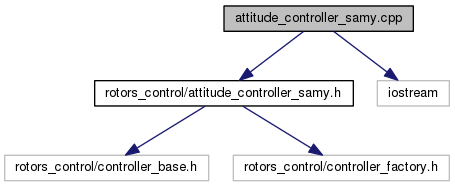
Include dependency graph for attitude_controller_samy.cpp:
Go to the source code of this file.
Functions | |
| ROTORS_CONTROL_REGISTER_CONTROLLER (AttitudeControllerSamy) | |
Go to the source code of this file.
Functions | |
| ROTORS_CONTROL_REGISTER_CONTROLLER (AttitudeControllerSamy) | |