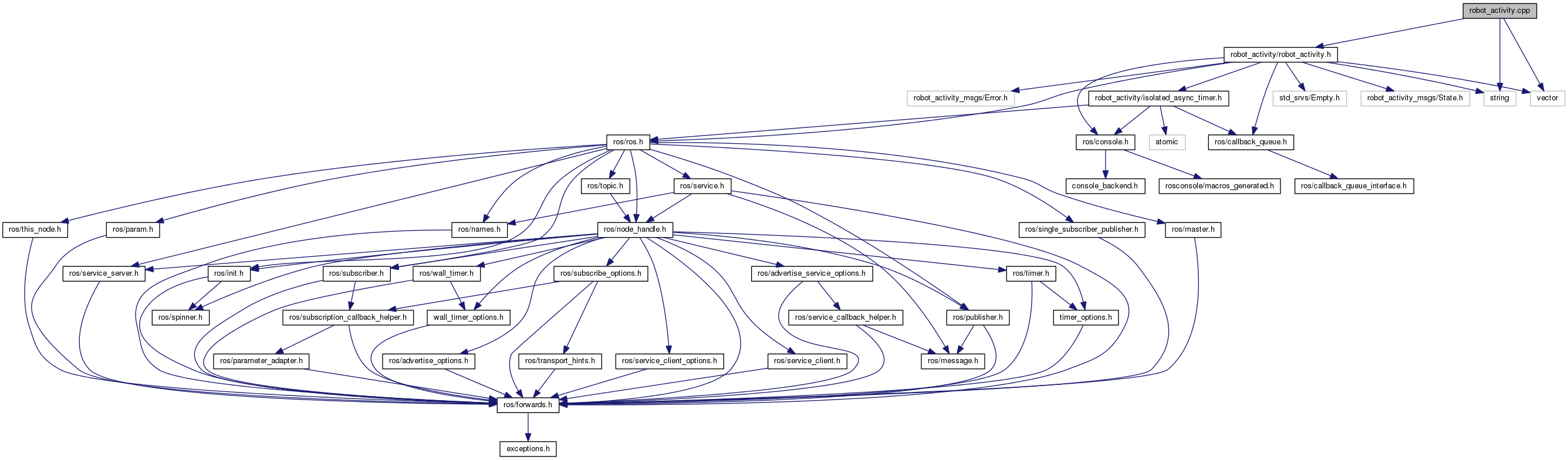
Include dependency graph for robot_activity.cpp:
Go to the source code of this file.
Namespaces | |
| namespace | robot_activity |
Defines | |
| #define | PRINT_FUNC_CALL(state) ROS_DEBUG_STREAM(#state << "() method called") |
Functions | |
| std::ostream & | robot_activity::operator<< (std::ostream &os, State state) |
| Overridden operator<< for easy State enum printing. | |
Define Documentation
| #define PRINT_FUNC_CALL | ( | state | ) | ROS_DEBUG_STREAM(#state << "() method called") |
Definition at line 42 of file robot_activity.cpp.