Provides a helper for managing joint trajectories. More...
#include <JointTrajectoryManager.h>
Public Member Functions | |
| void | addToJointGoalMap (const std::vector< std::string > &jointNames, const actionlib_msgs::GoalID goalId) |
| set trajectory | |
| JointTrajectoryManager () | |
| Constructor for the Joint Trajectory Manager (empty) | |
| void | removeFromJointGoalMap (const std::vector< std::string > &jointNames) |
| Remove the pairs with the specified jointNames from the Joint Goal Map. | |
| void | removeFromJointGoalMap (const actionlib_msgs::GoalID &goal) |
| Remove the pair with the specified GoalID from the Joint Goal Map. | |
| virtual | ~JointTrajectoryManager () |
Protected Types | |
| typedef std::map< std::string, actionlib_msgs::GoalID > | JointGoalMap_type |
Protected Member Functions | |
| virtual bool | isActive (const actionlib_msgs::GoalID &goalId) const =0 |
| is goal active | |
| std::string | jointGoalMapToString (void) const |
| Convert the Joint Goal Map into a String. | |
Protected Attributes | |
| JointGoalMap_type | jointGoalMap |
Detailed Description
Provides a helper for managing joint trajectories.
Definition at line 19 of file JointTrajectoryManager.h.
Member Typedef Documentation
typedef std::map<std::string, actionlib_msgs::GoalID> JointTrajectoryManager::JointGoalMap_type [protected] |
Definition at line 45 of file JointTrajectoryManager.h.
Constructor & Destructor Documentation
Constructor for the Joint Trajectory Manager (empty)
Definition at line 8 of file JointTrajectoryManager.cpp.
| JointTrajectoryManager::~JointTrajectoryManager | ( | ) | [virtual] |
Definition at line 13 of file JointTrajectoryManager.cpp.
Member Function Documentation
| void JointTrajectoryManager::addToJointGoalMap | ( | const std::vector< std::string > & | jointNames, |
| const actionlib_msgs::GoalID | goalId | ||
| ) |
set trajectory
Add specified joints and goal ID pairs to the Joint Goal Map.
- Parameters:
-
trajectory new trajectory
- Returns:
- void
- Exceptions:
-
runtime_error a joint in trajectory is already part of an active goal
if there is an existing trajectory, it is preempted
- Parameters:
-
jointNames Vector of joint names to add to the Goal Map goalId Goal Ids to pair with the joint names and insert into the Joint Goal Map
Definition at line 24 of file JointTrajectoryManager.cpp.
| virtual bool JointTrajectoryManager::isActive | ( | const actionlib_msgs::GoalID & | goalId | ) | const [protected, pure virtual] |
is goal active
- Parameters:
-
goalId goal ID to check
- Returns:
- bool active state
derived class must provide a way to check this
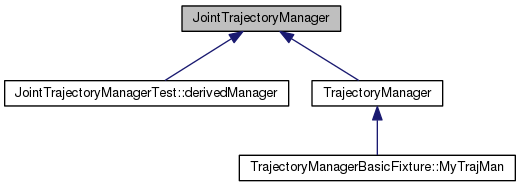
Implemented in TrajectoryManager, and JointTrajectoryManagerTest::derivedManager.
| std::string JointTrajectoryManager::jointGoalMapToString | ( | void | ) | const [protected] |
Convert the Joint Goal Map into a String.
- Returns:
- The string stream representation of the Joint Goal Map
Definition at line 108 of file JointTrajectoryManager.cpp.
| void JointTrajectoryManager::removeFromJointGoalMap | ( | const std::vector< std::string > & | jointNames | ) |
Remove the pairs with the specified jointNames from the Joint Goal Map.
- Parameters:
-
jointNames Pointer to vector of joint names to remove from the Joint Goal Map
- Exceptions:
-
runtime_error If one of the joint names specified is an active goal
Definition at line 43 of file JointTrajectoryManager.cpp.
| void JointTrajectoryManager::removeFromJointGoalMap | ( | const actionlib_msgs::GoalID & | goal | ) |
Remove the pair with the specified GoalID from the Joint Goal Map.
- Parameters:
-
goal Pointer to GoalID to remove from the Joint Goal Map
- Exceptions:
-
runtime_error If one of the GoalIDs specified is an active goal
Definition at line 75 of file JointTrajectoryManager.cpp.
Member Data Documentation
Definition at line 46 of file JointTrajectoryManager.h.
The documentation for this class was generated from the following files: