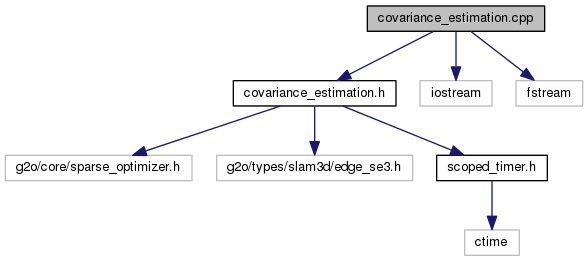
Include dependency graph for covariance_estimation.cpp:
Go to the source code of this file.
Functions | |
| Vector6d | absManhattanDistance (const Eigen::Isometry3d &tf1, const Eigen::Isometry3d &tf2) |
| InfoMatType | computeEmpiricalInformationMatrix (const Matrix6Xd &measurements, const Matrix6Xd &errors, const Vector6d ¤tMeasurement, const Vector6d &stdDeviation) |
| Vector6d | toVectorScaledAxis (Vector6d vecMQT) |
| Vector6d | toVectorScaledAxis (const Eigen::Isometry3d &tf) |
Function Documentation
| Vector6d absManhattanDistance | ( | const Eigen::Isometry3d & | tf1, |
| const Eigen::Isometry3d & | tf2 | ||
| ) | [inline] |
Definition at line 34 of file covariance_estimation.cpp.
| InfoMatType computeEmpiricalInformationMatrix | ( | const Matrix6Xd & | measurements, |
| const Matrix6Xd & | errors, | ||
| const Vector6d & | currentMeasurement, | ||
| const Vector6d & | stdDeviation | ||
| ) |
FIXME: Why are the results worse than without inverse, which is wrong?
Definition at line 41 of file covariance_estimation.cpp.
| Vector6d toVectorScaledAxis | ( | Vector6d | vecMQT | ) |
Definition at line 6 of file covariance_estimation.cpp.
| Vector6d toVectorScaledAxis | ( | const Eigen::Isometry3d & | tf | ) |
Definition at line 28 of file covariance_estimation.cpp.