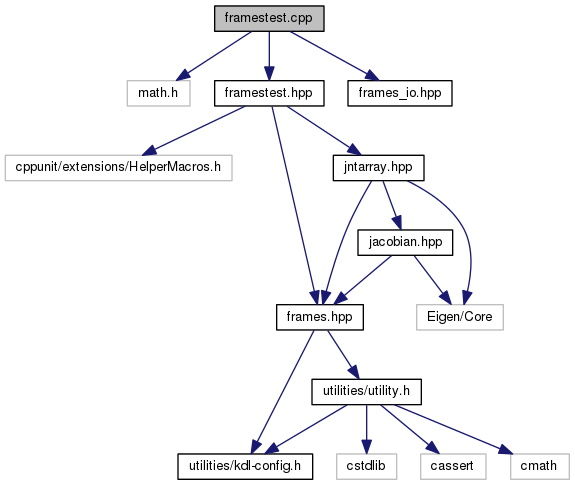
Include dependency graph for framestest.cpp:
Go to the source code of this file.
Defines | |
| #define | TESTEULERZYX(a, b, g) |
| #define | TESTEULERZYX_INVARIANT(a, b, g, a2, b2, g2) |
| #define | TESTEULERZYZ(a, b, g) |
| #define | TESTEULERZYZ_INVARIANT(a, b, g, a2, b2, g2) |
Functions | |
| CPPUNIT_TEST_SUITE_REGISTRATION (FramesTest) | |
Define Documentation
| #define TESTEULERZYX | ( | a, | |
| b, | |||
| g | |||
| ) |
Value:
{\
double eps=1E-14;\
Rotation R = Rotation::EulerZYX((a),(b),(g));\
double alpha,beta,gamma;\
R.GetEulerZYX(alpha,beta,gamma);\
CPPUNIT_ASSERT_DOUBLES_EQUAL((a),alpha,eps);\
CPPUNIT_ASSERT_DOUBLES_EQUAL((b),beta,eps);\
CPPUNIT_ASSERT_DOUBLES_EQUAL((g),gamma,eps);\
}
Definition at line 193 of file framestest.cpp.
| #define TESTEULERZYX_INVARIANT | ( | a, | |
| b, | |||
| g, | |||
| a2, | |||
| b2, | |||
| g2 | |||
| ) |
Value:
{\
double eps=1E-14;\
Rotation R1=Rotation::EulerZYX(a,b,g);\
Rotation R2=Rotation::EulerZYX(a2,b2,g2);\
CPPUNIT_ASSERT_DOUBLES_EQUAL(0,diff(R2,R1).Norm(),eps);\
}
Definition at line 214 of file framestest.cpp.
| #define TESTEULERZYZ | ( | a, | |
| b, | |||
| g | |||
| ) |
Value:
{\
double eps=1E-14;\
Rotation R = Rotation::EulerZYZ((a),(b),(g));\
double alpha,beta,gamma;\
R.GetEulerZYZ(alpha,beta,gamma);\
CPPUNIT_ASSERT_DOUBLES_EQUAL((a),alpha,eps);\
CPPUNIT_ASSERT_DOUBLES_EQUAL((b),beta,eps);\
CPPUNIT_ASSERT_DOUBLES_EQUAL((g),gamma,eps);\
}
Definition at line 204 of file framestest.cpp.
| #define TESTEULERZYZ_INVARIANT | ( | a, | |
| b, | |||
| g, | |||
| a2, | |||
| b2, | |||
| g2 | |||
| ) |
Value:
{\
double eps=1E-14;\
Rotation R1=Rotation::EulerZYZ(a,b,g);\
Rotation R2=Rotation::EulerZYZ(a2,b2,g2);\
CPPUNIT_ASSERT_DOUBLES_EQUAL(0,diff(R2,R1).Norm(),eps);\
}
Definition at line 221 of file framestest.cpp.