#include <LaserScanner.h>
Public Member Functions | |
| virtual void | gui_update (mrpt::opengl::COpenGLScene &scene) |
| See docs in base class. | |
| LaserScanner (VehicleBase &parent, const rapidxml::xml_node< char > *root) | |
| virtual void | loadConfigFrom (const rapidxml::xml_node< char > *root) |
| See docs in base class. | |
| virtual void | simul_post_timestep (const TSimulContext &context) |
| See docs in base class. | |
| virtual void | simul_pre_timestep (const TSimulContext &context) |
| See docs in base class. | |
| virtual | ~LaserScanner () |
Protected Attributes | |
| double | m_angleStdNoise |
| mrpt::opengl::CPlanarLaserScan::Ptr | m_gl_scan |
| call of gui_update() from m_last_scan2gui | |
| bool | m_gui_uptodate |
| mrpt::obs::CObservation2DRangeScan::Ptr | m_last_scan |
| Last simulated scan. | |
| mrpt::obs::CObservation2DRangeScan::Ptr | m_last_scan2gui |
| std::mutex | m_last_scan_cs |
| std::string | m_name |
| sensor label/name | |
| double | m_rangeStdNoise |
| CObservation2DRangeScan | m_scan_model |
| or not (Default=true) | |
| bool | m_see_fixtures |
| mrpt::poses::CPose2D | m_sensor_pose_on_veh |
| int | m_z_order |
| to help rendering multiple scans | |
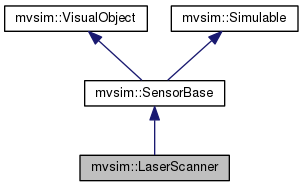
Detailed Description
Definition at line 29 of file LaserScanner.h.
Constructor & Destructor Documentation
| LaserScanner::LaserScanner | ( | VehicleBase & | parent, |
| const rapidxml::xml_node< char > * | root | ||
| ) |
Definition at line 25 of file LaserScanner.cpp.
| LaserScanner::~LaserScanner | ( | ) | [virtual] |
Definition at line 36 of file LaserScanner.cpp.
Member Function Documentation
| void LaserScanner::gui_update | ( | mrpt::opengl::COpenGLScene & | scene | ) | [virtual] |
See docs in base class.
Implements mvsim::VisualObject.
Definition at line 80 of file LaserScanner.cpp.
| void LaserScanner::loadConfigFrom | ( | const rapidxml::xml_node< char > * | root | ) | [virtual] |
See docs in base class.
Implements mvsim::SensorBase.
Definition at line 37 of file LaserScanner.cpp.
| void LaserScanner::simul_post_timestep | ( | const TSimulContext & | context | ) | [virtual] |
See docs in base class.
Reimplemented from mvsim::Simulable.
Definition at line 113 of file LaserScanner.cpp.
| void LaserScanner::simul_pre_timestep | ( | const TSimulContext & | context | ) | [virtual] |
See docs in base class.
Reimplemented from mvsim::Simulable.
Definition at line 111 of file LaserScanner.cpp.
Member Data Documentation
double mvsim::LaserScanner::m_angleStdNoise [protected] |
Definition at line 51 of file LaserScanner.h.
mrpt::opengl::CPlanarLaserScan::Ptr mvsim::LaserScanner::m_gl_scan [protected] |
call of gui_update() from m_last_scan2gui
Definition at line 67 of file LaserScanner.h.
bool mvsim::LaserScanner::m_gui_uptodate [protected] |
Whether m_gl_scan has to be updated upon next
Definition at line 65 of file LaserScanner.h.
mrpt::obs::CObservation2DRangeScan::Ptr mvsim::LaserScanner::m_last_scan [protected] |
Last simulated scan.
Definition at line 62 of file LaserScanner.h.
mrpt::obs::CObservation2DRangeScan::Ptr mvsim::LaserScanner::m_last_scan2gui [protected] |
Definition at line 63 of file LaserScanner.h.
std::mutex mvsim::LaserScanner::m_last_scan_cs [protected] |
This obj will be copied as a "pattern" to fill it with actual scan data.
Definition at line 60 of file LaserScanner.h.
std::string mvsim::LaserScanner::m_name [protected] |
sensor label/name
Definition at line 49 of file LaserScanner.h.
double mvsim::LaserScanner::m_rangeStdNoise [protected] |
Definition at line 50 of file LaserScanner.h.
CObservation2DRangeScan mvsim::LaserScanner::m_scan_model [protected] |
bool mvsim::LaserScanner::m_see_fixtures [protected] |
Whether all box2d "fixtures" are visible (solid)
Definition at line 52 of file LaserScanner.h.
mrpt::poses::CPose2D mvsim::LaserScanner::m_sensor_pose_on_veh [protected] |
Definition at line 48 of file LaserScanner.h.
int mvsim::LaserScanner::m_z_order [protected] |
to help rendering multiple scans
Definition at line 47 of file LaserScanner.h.
The documentation for this class was generated from the following files: