#include <boost/numeric/ublas/vector.hpp>#include <boost/numeric/ublas/matrix.hpp>#include <boost/math/special_functions/fpclassify.hpp>#include "ros/ros.h"#include "lyap_control/plant_msg.h"#include "lyap_control/controller_msg.h"#include "lyap_control/controller_globals.h"
Include dependency graph for controller.h:
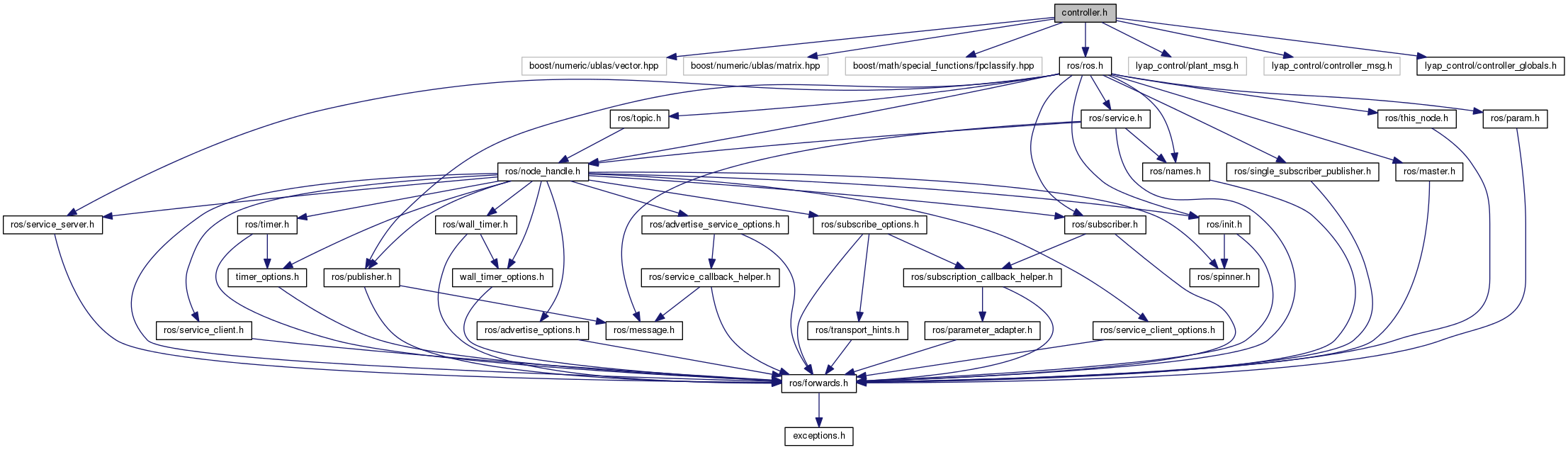
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Typedefs | |
| typedef boost::numeric::ublas::vector < double > | ublas_vector |
Functions | |
| void | calculate_dx_dot_du (boost::numeric::ublas::matrix< double > &dx_dot_du, ublas_vector &open_loop_dx_dt) |
| void | calculate_u (ublas_vector &D, ublas_vector &open_loop_dx_dt, const double &V_dot_target, boost::numeric::ublas::matrix< double > &dx_dot_du) |
| void | calculate_V_and_damping (double &V_dot_target) |
| void | chatterCallback (const lyap_control::plant_msg &msg) |
| void | initial_error_check (const lyap_control::plant_msg &msg) |
| void | model_definition (const ublas_vector &x, ublas_vector &dxdt, const double t) |
Variables | |
| static const double | g = 1.0 |
| static const double | high_saturation_limit [] = {10.0, 10.0} |
| static const double | low_saturation_limit [] = {-10.0, -10.0} |
| static const double | switching_threshold = 0.01 |
| static const double | V_dot_target_initial_dB = -100.0 |
Typedef Documentation
| typedef boost::numeric::ublas::vector<double> ublas_vector |
Definition at line 5 of file controller.h.
Function Documentation
| void calculate_dx_dot_du | ( | boost::numeric::ublas::matrix< double > & | dx_dot_du, |
| ublas_vector & | open_loop_dx_dt | ||
| ) |
Definition at line 138 of file controller.cpp.
| void calculate_u | ( | ublas_vector & | D, |
| ublas_vector & | open_loop_dx_dt, | ||
| const double & | V_dot_target, | ||
| boost::numeric::ublas::matrix< double > & | dx_dot_du | ||
| ) |
Definition at line 189 of file controller.cpp.
| void calculate_V_and_damping | ( | double & | V_dot_target | ) |
Definition at line 170 of file controller.cpp.
| void chatterCallback | ( | const lyap_control::plant_msg & | msg | ) |
Definition at line 41 of file controller.cpp.
| void initial_error_check | ( | const lyap_control::plant_msg & | msg | ) |
Definition at line 104 of file controller.cpp.
| void model_definition | ( | const ublas_vector & | x, |
| ublas_vector & | dxdt, | ||
| const double | t | ||
| ) |
Definition at line 36 of file controller.h.
Variable Documentation
const double g = 1.0 [static] |
Definition at line 28 of file controller.h.
const double high_saturation_limit[] = {10.0, 10.0} [static] |
Definition at line 24 of file controller.h.
const double low_saturation_limit[] = {-10.0, -10.0} [static] |
Definition at line 25 of file controller.h.
const double switching_threshold = 0.01 [static] |
Definition at line 31 of file controller.h.
const double V_dot_target_initial_dB = -100.0 [static] |
Definition at line 22 of file controller.h.