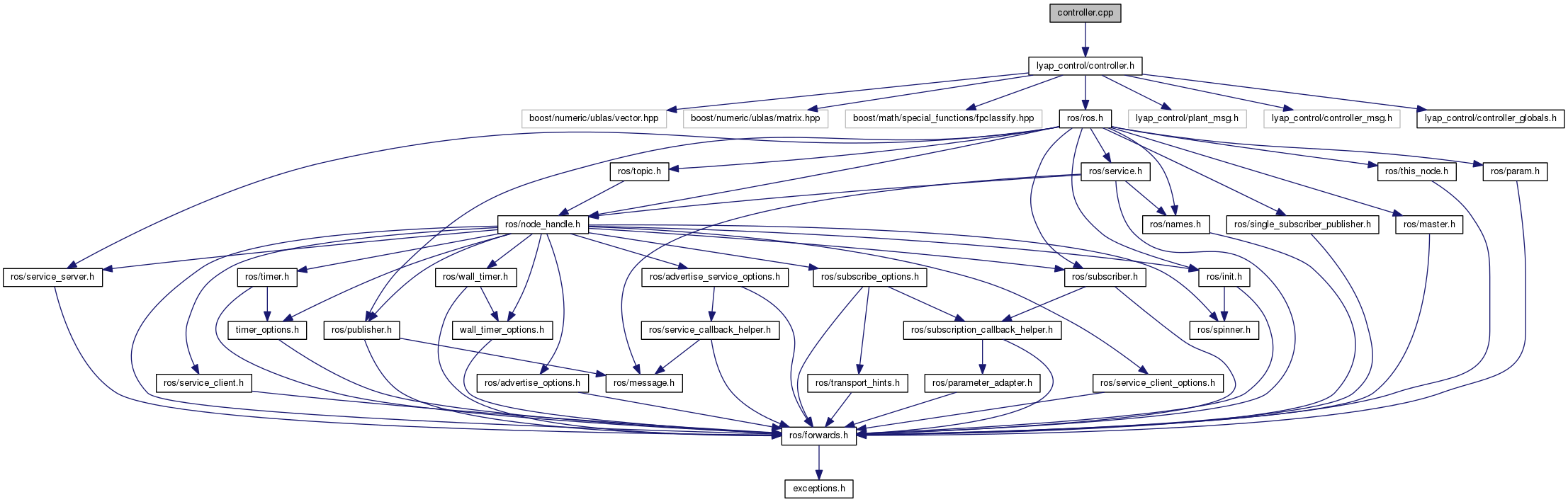
#include "lyap_control/controller.h"
Include dependency graph for controller.cpp:
Go to the source code of this file.
Functions | |
| void | calculate_dx_dot_du (boost::numeric::ublas::matrix< double > &dx_dot_du, ublas_vector &open_loop_dx_dt) |
| void | calculate_u (ublas_vector &D, ublas_vector &open_loop_dx_dt, const double &V_dot_target, boost::numeric::ublas::matrix< double > &dx_dot_du) |
| void | calculate_V_and_damping (double &V_dot_target) |
| void | chatterCallback (const lyap_control::plant_msg &msg) |
| void | initial_error_check (const lyap_control::plant_msg &msg) |
| int | main (int argc, char **argv) |
Function Documentation
| void calculate_dx_dot_du | ( | boost::numeric::ublas::matrix< double > & | dx_dot_du, |
| ublas_vector & | open_loop_dx_dt | ||
| ) |
Definition at line 138 of file controller.cpp.
| void calculate_u | ( | ublas_vector & | D, |
| ublas_vector & | open_loop_dx_dt, | ||
| const double & | V_dot_target, | ||
| boost::numeric::ublas::matrix< double > & | dx_dot_du | ||
| ) |
Definition at line 189 of file controller.cpp.
| void calculate_V_and_damping | ( | double & | V_dot_target | ) |
Definition at line 170 of file controller.cpp.
| void chatterCallback | ( | const lyap_control::plant_msg & | msg | ) |
Definition at line 41 of file controller.cpp.
| void initial_error_check | ( | const lyap_control::plant_msg & | msg | ) |
Definition at line 104 of file controller.cpp.
| int main | ( | int | argc, |
| char ** | argv | ||
| ) |
Definition at line 10 of file controller.cpp.