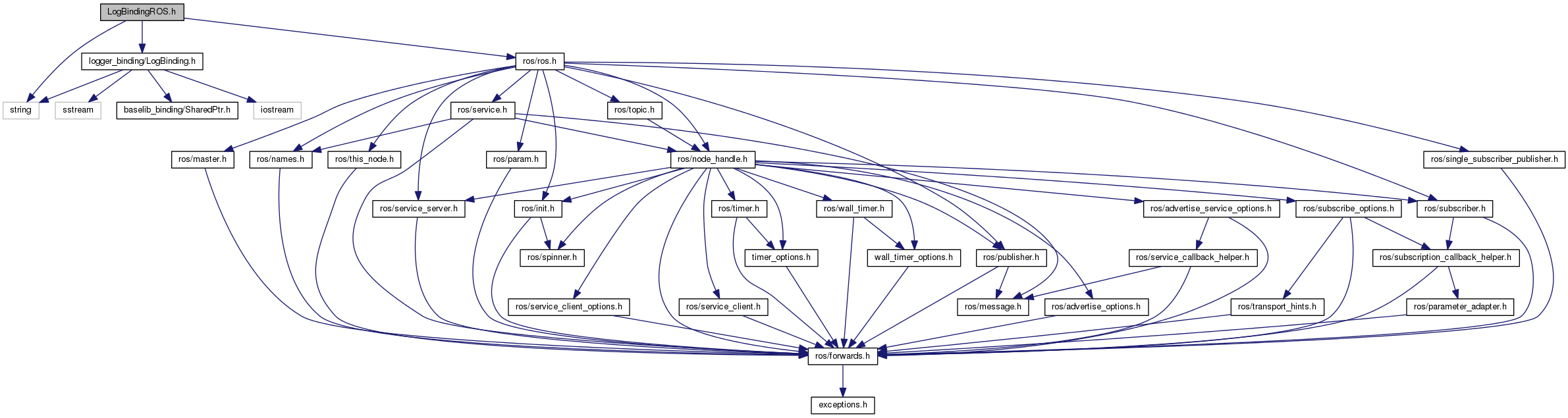
Include dependency graph for LogBindingROS.h:
Go to the source code of this file.
Classes | |
| class | logger_binding::ROSLog |
| Class to bind to the ROS message printing. More... | |
Namespaces | |
| namespace | logger_binding |
Defines | |
| #define | PRINT_INIT_ROS() |
Define Documentation
| #define PRINT_INIT_ROS | ( | ) |
Value:
{\
if (logger_binding::Log::Singleton) \
{ \
std::cerr << "Singleton already set, overwriting!" << std::endl;\
} \
logger_binding::Log::Singleton = logger_binding::Log::LogPtr(new logger_binding::ROSLog()); \
}
Definition at line 73 of file LogBindingROS.h.