#include <stdio.h>#include <vector>#include <iostream>#include <string>#include <cmath>#include <fstream>#include <ctime>#include "kinematics.h"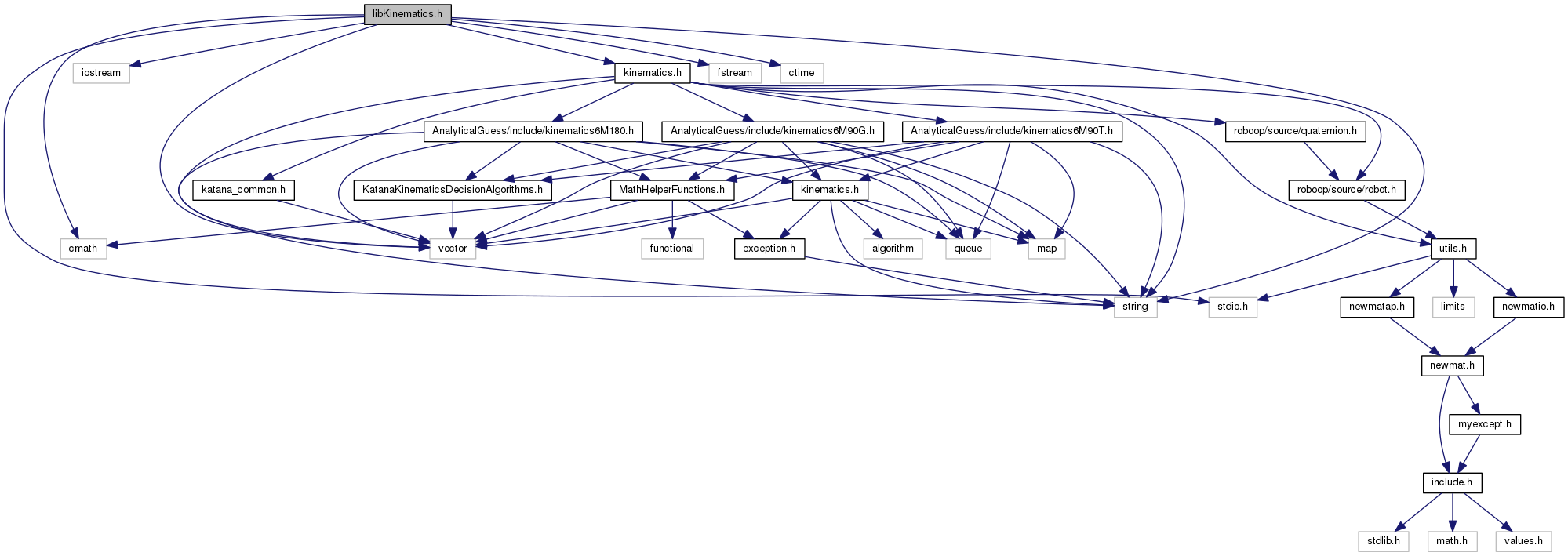
Go to the source code of this file.
Classes | |
| struct | FloatVector |
| struct | IntVector |
Defines | |
| #define | _declspec(dllexport) int kin_setType(int type) |
| This sets the robot type. | |
Typedefs | |
| typedef struct FloatVector | FloatVector |
| typedef struct IntVector | IntVector |
Variables | |
| FloatVector FloatVector * | a |
| FloatVector FloatVector FloatVector * | alpha |
| FloatVector * | angle |
| FloatVector * | angleK4D |
| FloatVector * | angleMDH |
| FloatVector * | d |
| IntVector * | enc |
| FloatVector FloatVector int | maxBisection = 0) |
| FloatVector * | pose |
| FloatVector * | prev |
| FloatVector FloatVector FloatVector int | typeNr = -1) |
Define Documentation
| #define _declspec | ( | dllexport | ) |
This sets the robot type.
This calculates the inverse kinematics.
This calculates the direct kinematics.
This converts angles in mDH convention to encoders.
This converts encoders to angles in mDH convention.
This converts angles from mDH to Katana4D convention.
This converts angles from Katana4D to mDH convention.
This cleans the kinematics library.
This initializes the kinematic.
Get the version number of the library.
Get the tcp offset.
Get the angle range.
Get the angle offsets.
Get the rotation direction.
Get the encoder offsets.
Get the encoders per cycle.
Get the immobile flag of the last joint.
Get the modified Denavit-Hartenberg parameters.
Get the degree of mobility.
Get the degree of freedom.
Get the maximum degree of freedom.
Get the robot type.
This sets the tcp offset.
This sets the angle range.
This sets the angle offsets.
This sets the rotation direction.
This sets the encoder offsets.
This sets the encoders per cycle.
This sets the immobile flag of the last joint.
This sets the link length parameters (part of mDH-parameters)
This sets the modified Denavit-Hartenberg parameters.
Setting robot type includes setting mDH parameters, immobile flag, degree of freedom (dof), degree of mobility (dom) and angles.
type dof dom 6M90A_F 6 6 6M90A_G 6 5 6M180 5 5 6M90B_F 6 6 6M90B_G 6 5
- Parameters:
-
type 0: 6M90A_F, 1: 6M90A_G, 2: 6M180, 3: 6M90B_F, 4: 6M90B_G
- Returns:
- 0 if successful, < 0 if failed
Transformation from previous to current link: move a along (previous) x-axis, rotate alpha about (previous) x-axis, move d along (current) z-axis, rotate theta about (current) z-axis. Setting the mDH parameters includes setting dof, adjusting immobile flag (all free) and dom (= dof).
The length of the vectors need to be the same.
- Parameters:
-
theta angle about z-axis d distance along x-axis a distance previous to current along previous x-axis alpha angle about previous x-axis typeNr 0: 6M90A_F, 1: 6M90A_G, 2: 6M180, 3: 6M90B_F, 4: 6M90B_G, -1: other
- Returns:
- 0 if successful, < 0 if failed
Setting link length parameters requires the type to be set to 0 (6M90A_F), 1 (6M90A_G), 2 (6M180), 3 (6M90B_F) or 4 (6M90B_G). This is done using the setType or setModifiedDH function that set the mDH parameters so they can be adjusted. The length of the vector has to be four.
- Parameters:
-
links length of the links in m
- Returns:
- 0 if successful, < 0 if failed
Flag for the last joint if it is free (0) or locked (1). Setting the immobile flag includes adjusting dom. Type or mDH parameters have to be set.
- Parameters:
-
immobile last joint immobile flag: 0 for free, 1 for locked (immobile)
- Returns:
- 0 if successful, < 0 if failed
Number of encoders in a full cycle of each joint. Length of epc needs to be equal to DOM set with Type or mDH parameters.
- Parameters:
-
epc encoders pec cycle
- Returns:
- 0 if successful, < 0 if failed
The encoder values at the calibration stops. Length of encOffset needs to be equal to DOM set with Type or mDH parameters.
- Parameters:
-
encOffset encoder values at calibration stops
- Returns:
- 0 if successful, < 0 if failed
The rotation direction of the joints: +1 if encoders and angles (mDH convention) grow in same direction, -1 if encoders and angles grow in opposit direction. Length of rotDir needs to be equal to DOM set with Type or mDH parameters.
- Parameters:
-
rotDir rotation direction of the joints
- Returns:
- 0 if successful, < 0 if failed
The angles at the calibration stops in mDH convention! Length of angleOffset needs to be equal to DOM set with Type or mDH parameters.
- Parameters:
-
angleOffset angle values at calibration stops in mDH
- Returns:
- 0 if successful, < 0 if failed
The angle range from angle offset to angle stop in mDH convention (negative if angleOffset > angleStop)! Length of angleRange needs to be equal to DOM set with Type or mDH parameters.
- Parameters:
-
angleRange angle range from angle offset to angle stop
- Returns:
- 0 if successful, < 0 if failed
Offset from the flange to the effective tcp.
- Parameters:
-
tcpOffset (x, y, z, psi) offset in m and rad respectively where psi is rotation about x-axis of tool coordinate system
- Returns:
- 0 if successful, < 0 if failed
Get the robot type
- Returns:
- 0 for 6M90A_F, 1 for 6M90A_G, 2 for 6M180, 3 for 6M90B_F, 4 for 6M90B_G, -1 for other or not set yet
Get the maximum degree of freedom (length of array in the vectors)
- Returns:
- Maximum degree of freedom
Get the degree of freedom
- Returns:
- Degree of freedom or -1 if not set yet
Get the degree of mobility
- Returns:
- Degree of mobility or -1 if not set yet
- Parameters:
-
theta vector to write in angle about z-axis d vector to write in distance along x-axis a vector to write in distance previous to current along previous x-axis alpha vector to write in angle about previous x-axis
- Returns:
- 0 if successful, < 0 if failed
- 0 if mobile, 1 if immobile, < 0 if failed
- Parameters:
-
epc vector to write in encoders pec cycle
- Returns:
- 0 if successful, < 0 if failed
- Parameters:
-
encOffset vector to write in encoder values at calibration stops
- Returns:
- 0 if successful, < 0 if failed
- Parameters:
-
rotDir vector to write in rotation direction of the joints
- Returns:
- 0 if successful, < 0 if failed
- Parameters:
-
angleOffset vector to write in angle values at calibration stops in mDH
- Returns:
- 0 if successful, < 0 if failed
- Parameters:
-
angleRange vector to write in angle range from angle offset to angle stop
- Returns:
- 0 if successful, < 0 if failed
- Parameters:
-
tcpOffset vector to write in (x, y, z, psi) offset
- Returns:
- 0 if successful, < 0 if failed
- Parameters:
-
version vector to write in version (major, minor, revision)
- Returns:
- 0 if successful, < 0 if failed
Initialize the kinematic. Parameters mDH, dof, angle offset and angle range (SetType or SetMDH and SetAngleOffset and SetAngleRange) have to be set prior to initialization of the kinematic!
- Returns:
- 0 if successful, < 0 if failed
Free memory allocated in setType() / setMDH() before closing the library
- Returns:
- 0 if successful, < 0 if failed
Length of angleK4D needs to be equal to DOM set with Type or mDH parameters.
- Parameters:
-
angleK4D angle in K4D convention angleMDH angle in mDH convention
- Returns:
- 0 if successful, < 0 if failed
Length of angleMDH needs to be equal to DOM set with Type or mDH parameters.
- Parameters:
-
angleMDH angle in mDH convention angleK4D angle in K4D convention
- Returns:
- 0 if successful, < 0 if failed
Length of enc needs to be equal to DOM set with Type or mDH parameters.
- Parameters:
-
enc encoders angle angles in mDH convention
- Returns:
- 0 if successful, < 0 if failed
Length of angle needs to be equal to DOM set with Type or mDH parameters.
- Parameters:
-
angle angle in mDH convention enc encoders
- Returns:
- 0 if successful, < 0 if failed
Length of angle needs to be equal to DOM set with Type or mDH parameters.
- Parameters:
-
angle angles in mDH convention pose pose of the TCP [x, y, z, phi, theta, psi]
- Returns:
- 0 if successful, < 0 if failed
Length of prev needs to be equal to DOM set with Type or mDH parameters.
- Parameters:
-
pose pose of the TCP [x, y, z, phi, theta, psi] prev previous angles (starting point) angle angles in mDH convention maxBisection maximum number of bisections done, if no solution found
- Returns:
- 0 if successful, < 0 if failed
Definition at line 19 of file lib/kinematics/libKinematics.h.
Typedef Documentation
| typedef struct FloatVector FloatVector |
Variable Documentation
Definition at line 88 of file lib/kinematics/libKinematics.h.
Definition at line 88 of file lib/kinematics/libKinematics.h.
Definition at line 333 of file lib/kinematics/libKinematics.h.
Definition at line 323 of file lib/kinematics/libKinematics.h.
Definition at line 313 of file lib/kinematics/libKinematics.h.
Definition at line 88 of file lib/kinematics/libKinematics.h.
Definition at line 343 of file lib/kinematics/libKinematics.h.
| FloatVector FloatVector int maxBisection = 0) |
Definition at line 366 of file lib/kinematics/libKinematics.h.
Definition at line 353 of file lib/kinematics/libKinematics.h.
Definition at line 365 of file lib/kinematics/libKinematics.h.
| FloatVector FloatVector FloatVector int typeNr = -1) |
Definition at line 89 of file lib/kinematics/libKinematics.h.