#include <PortHandler.h>
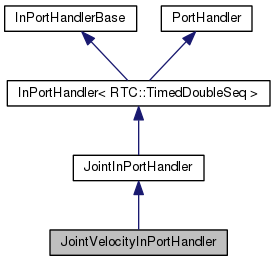
Inheritance diagram for JointVelocityInPortHandler:
Public Member Functions | |
| JointVelocityInPortHandler (RTC::DataFlowComponentBase *i_rtc, const char *i_portName, const std::vector< hrp::Link * > &i_joints, std::vector< OpenHRP::RobotHardwareService::SwitchStatus > *i_servo) | |
| void | update () |
Detailed Description
Definition at line 102 of file PortHandler.h.
Constructor & Destructor Documentation
| JointVelocityInPortHandler::JointVelocityInPortHandler | ( | RTC::DataFlowComponentBase * | i_rtc, |
| const char * | i_portName, | ||
| const std::vector< hrp::Link * > & | i_joints, | ||
| std::vector< OpenHRP::RobotHardwareService::SwitchStatus > * | i_servo | ||
| ) |
Definition at line 67 of file PortHandler.cpp.
Member Function Documentation
| void JointVelocityInPortHandler::update | ( | void | ) | [virtual] |
Implements InPortHandlerBase.
Definition at line 76 of file PortHandler.cpp.
The documentation for this class was generated from the following files: