#include <PortHandler.h>
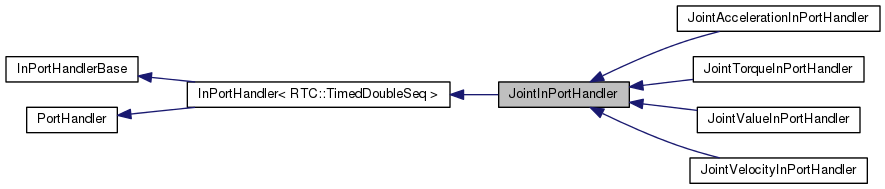
Inheritance diagram for JointInPortHandler:
Public Member Functions | |
| JointInPortHandler (RTC::DataFlowComponentBase *i_rtc, const char *i_portName, const std::vector< hrp::Link * > &i_joints, std::vector< OpenHRP::RobotHardwareService::SwitchStatus > *i_servo) | |
Protected Attributes | |
| std::vector< hrp::Link * > | m_joints |
| std::vector < OpenHRP::RobotHardwareService::SwitchStatus > & | m_servo |
Detailed Description
Definition at line 61 of file PortHandler.h.
Constructor & Destructor Documentation
| JointInPortHandler::JointInPortHandler | ( | RTC::DataFlowComponentBase * | i_rtc, |
| const char * | i_portName, | ||
| const std::vector< hrp::Link * > & | i_joints, | ||
| std::vector< OpenHRP::RobotHardwareService::SwitchStatus > * | i_servo | ||
| ) |
Definition at line 8 of file PortHandler.cpp.
Member Data Documentation
std::vector<hrp::Link *> JointInPortHandler::m_joints [protected] |
Definition at line 69 of file PortHandler.h.
std::vector<OpenHRP::RobotHardwareService::SwitchStatus>& JointInPortHandler::m_servo [protected] |
Definition at line 70 of file PortHandler.h.
The documentation for this class was generated from the following files: