Feedback and Feedforward Controller which use PDModel as motor model. More...
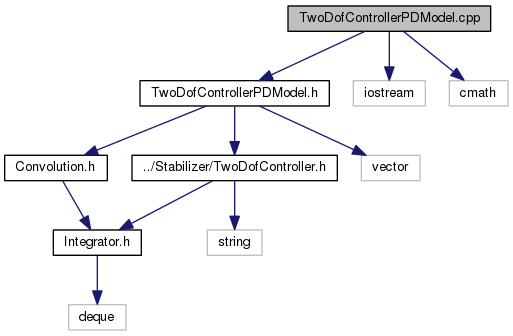
Include dependency graph for TwoDofControllerPDModel.cpp:
Go to the source code of this file.
Defines | |
| #define | NUM_CONVOLUTION_TERM 3 |
Detailed Description
Feedback and Feedforward Controller which use PDModel as motor model.
- Date:
- $Date$
$Id$
Definition in file TwoDofControllerPDModel.cpp.
Define Documentation
| #define NUM_CONVOLUTION_TERM 3 |
Definition at line 15 of file TwoDofControllerPDModel.cpp.