null component More...
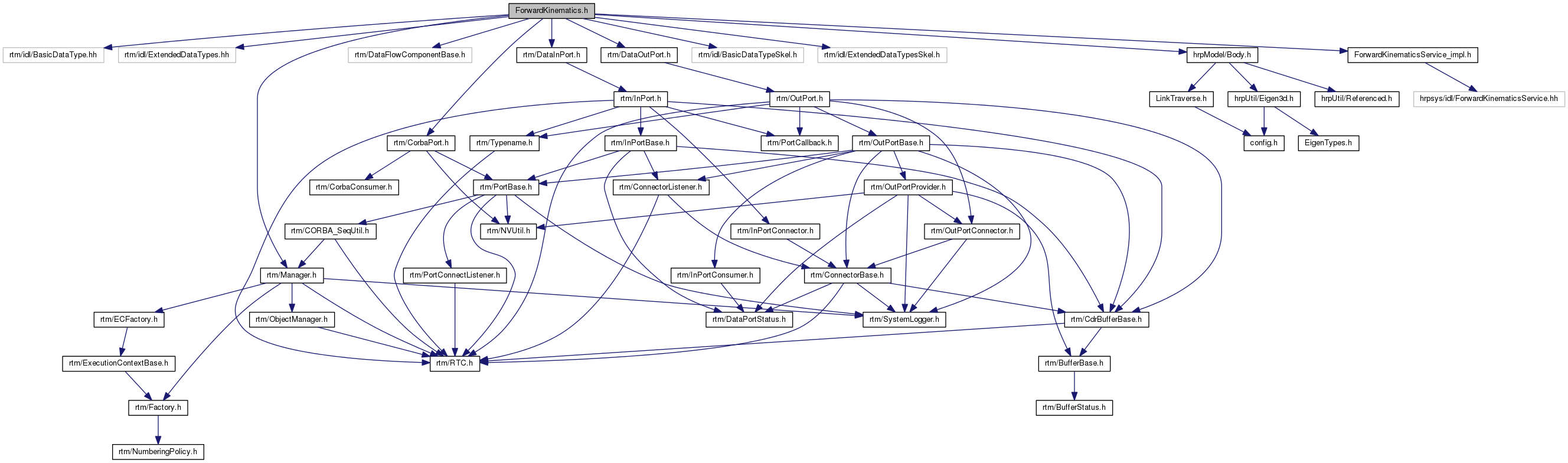
#include <rtm/idl/BasicDataType.hh>#include <rtm/idl/ExtendedDataTypes.hh>#include <rtm/Manager.h>#include <rtm/DataFlowComponentBase.h>#include <rtm/CorbaPort.h>#include <rtm/DataInPort.h>#include <rtm/DataOutPort.h>#include <rtm/idl/BasicDataTypeSkel.h>#include <rtm/idl/ExtendedDataTypesSkel.h>#include <hrpModel/Body.h>#include "ForwardKinematicsService_impl.h"
Include dependency graph for ForwardKinematics.h:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Classes | |
| class | ForwardKinematics |
| sample RT component which has one data input port and one data output port More... | |
Namespaces | |
| namespace | hrp |
Functions | |
| void | ForwardKinematicsInit (RTC::Manager *manager) |
Detailed Description
Function Documentation
| void ForwardKinematicsInit | ( | RTC::Manager * | manager | ) |
Definition at line 356 of file ForwardKinematics.cpp.