#include "hrpsys/util/Hrpsys.h"#include "hrpsys/idl/pointcloud.hh"#include "hrpsys/idl/RobotHardwareService.hh"#include "DataLogger.h"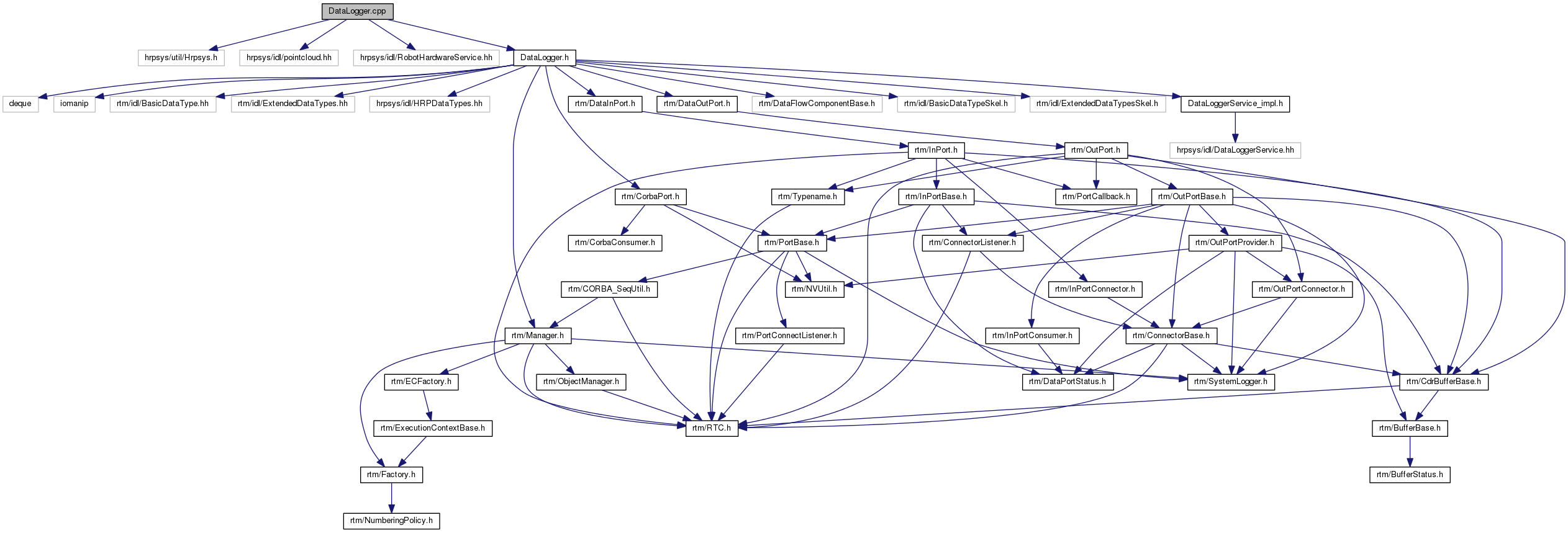
Go to the source code of this file.
Classes | |
| class | LoggerPort< T > |
| class | LoggerPortForPointCloud |
Defines | |
| #define | LOG_SET_PRECISION(strm) |
| #define | LOG_UNSET_PRECISION(strm) |
Typedefs | |
| typedef coil::Guard< coil::Mutex > | Guard |
Functions | |
| void | DataLoggerInit (RTC::Manager *manager) |
| template<class T > | |
| std::ostream & | operator<< (std::ostream &os, const _CORBA_Unbounded_Sequence< T > &data) |
| std::ostream & | operator<< (std::ostream &os, const OpenHRP::RobotHardwareService::DblSequence6 &data) |
| std::ostream & | operator<< (std::ostream &os, const OpenHRP::RobotHardwareService::DblSequence3 &data) |
| std::ostream & | operator<< (std::ostream &os, const OpenHRP::RobotHardwareService::BatteryState &data) |
| void | printData (std::ostream &os, const RTC::Acceleration3D &data, unsigned int precision=0) |
| void | printData (std::ostream &os, const RTC::Velocity2D &data, unsigned int precision=0) |
| void | printData (std::ostream &os, const RTC::Pose3D &data, unsigned int precision=0) |
| void | printData (std::ostream &os, const RTC::AngularVelocity3D &data, unsigned int precision=0) |
| void | printData (std::ostream &os, const RTC::Point3D &data, unsigned int precision=0) |
| void | printData (std::ostream &os, const RTC::Vector3D &data, unsigned int precision=0) |
| void | printData (std::ostream &os, const RTC::Orientation3D &data, unsigned int precision=0) |
| void | printData (std::ostream &os, const PointCloudTypes::PointCloud &data, unsigned int precision=0) |
| template<class T > | |
| void | printData (std::ostream &os, const T &data, unsigned int precision=0) |
| void | printData (std::ostream &os, double data, unsigned int precision=0) |
| void | printData (std::ostream &os, const OpenHRP::RobotHardwareService::RobotState2 &data, unsigned int precision=0) |
Variables | |
| static const char * | nullcomponent_spec [] |
Define Documentation
| #define LOG_SET_PRECISION | ( | strm | ) |
int prc; \
if (precision != 0) { \
prc = os.precision(); \
os << std::scientific << std::setprecision(precision); \
} \
Definition at line 38 of file DataLogger.cpp.
| #define LOG_UNSET_PRECISION | ( | strm | ) |
if (precision != 0) \
os << std::fixed << std::setprecision(prc); \
Definition at line 45 of file DataLogger.cpp.
Typedef Documentation
| typedef coil::Guard<coil::Mutex> Guard |
Definition at line 16 of file DataLogger.cpp.
Function Documentation
| void DataLoggerInit | ( | RTC::Manager * | manager | ) |
Definition at line 560 of file DataLogger.cpp.
| std::ostream& operator<< | ( | std::ostream & | os, |
| const _CORBA_Unbounded_Sequence< T > & | data | ||
| ) |
Definition at line 122 of file DataLogger.cpp.
| std::ostream& operator<< | ( | std::ostream & | os, |
| const OpenHRP::RobotHardwareService::DblSequence6 & | data | ||
| ) |
Definition at line 130 of file DataLogger.cpp.
| std::ostream& operator<< | ( | std::ostream & | os, |
| const OpenHRP::RobotHardwareService::DblSequence3 & | data | ||
| ) |
Definition at line 138 of file DataLogger.cpp.
| std::ostream& operator<< | ( | std::ostream & | os, |
| const OpenHRP::RobotHardwareService::BatteryState & | data | ||
| ) |
Definition at line 146 of file DataLogger.cpp.
Definition at line 49 of file DataLogger.cpp.
Definition at line 56 of file DataLogger.cpp.
Definition at line 63 of file DataLogger.cpp.
| void printData | ( | std::ostream & | os, |
| const RTC::AngularVelocity3D & | data, | ||
| unsigned int | precision = 0 |
||
| ) |
Definition at line 72 of file DataLogger.cpp.
Definition at line 79 of file DataLogger.cpp.
Definition at line 86 of file DataLogger.cpp.
Definition at line 93 of file DataLogger.cpp.
| void printData | ( | std::ostream & | os, |
| const PointCloudTypes::PointCloud & | data, | ||
| unsigned int | precision = 0 |
||
| ) |
Definition at line 100 of file DataLogger.cpp.
Definition at line 153 of file DataLogger.cpp.
Definition at line 162 of file DataLogger.cpp.
| void printData | ( | std::ostream & | os, |
| const OpenHRP::RobotHardwareService::RobotState2 & | data, | ||
| unsigned int | precision = 0 |
||
| ) |
Definition at line 169 of file DataLogger.cpp.
Variable Documentation
const char* nullcomponent_spec[] [static] |
{
"implementation_id", "DataLogger",
"type_name", "DataLogger",
"description", "data logger component",
"version", HRPSYS_PACKAGE_VERSION,
"vendor", "AIST",
"category", "example",
"activity_type", "DataFlowComponent",
"max_instance", "10",
"language", "C++",
"lang_type", "compile",
"conf.default.log_precision", "0",
""
}
Definition at line 20 of file DataLogger.cpp.