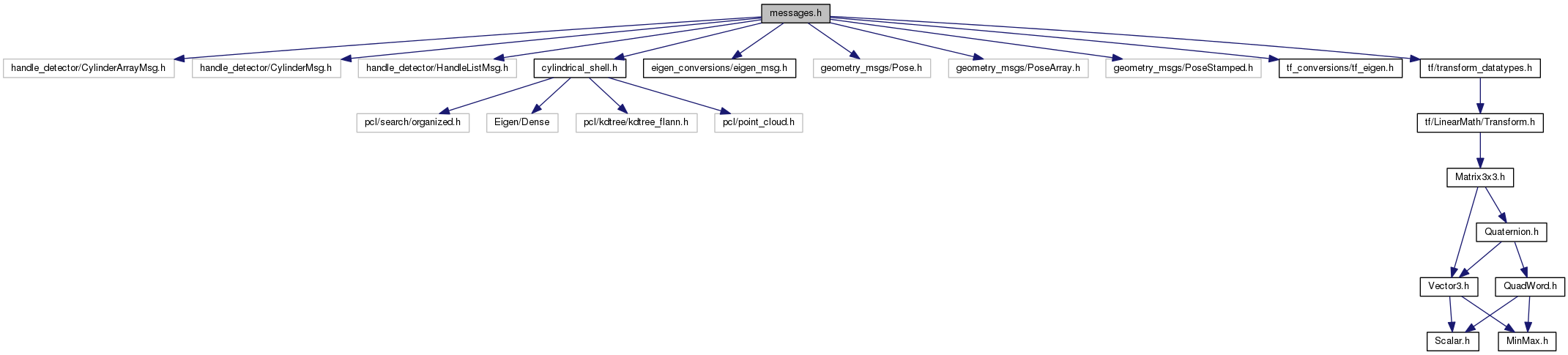
#include "handle_detector/CylinderArrayMsg.h"#include "handle_detector/CylinderMsg.h"#include "handle_detector/HandleListMsg.h"#include "cylindrical_shell.h"#include <eigen_conversions/eigen_msg.h>#include <geometry_msgs/Pose.h>#include <geometry_msgs/PoseArray.h>#include <geometry_msgs/PoseStamped.h>#include <tf_conversions/tf_eigen.h>#include <tf/transform_datatypes.h>
Include dependency graph for messages.h:
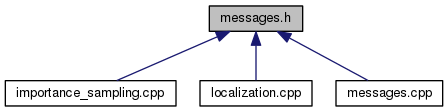
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | Messages |
| Messages creates custom ROS messages to publish the results of the localization. The messages that can be created are: CylinderArray, Cylinder, and HandleList. More... | |