#include "Eigen/Dense"#include <pcl/kdtree/kdtree_flann.h>#include <pcl/point_cloud.h>#include <pcl/search/organized.h>
Include dependency graph for cylindrical_shell.h:

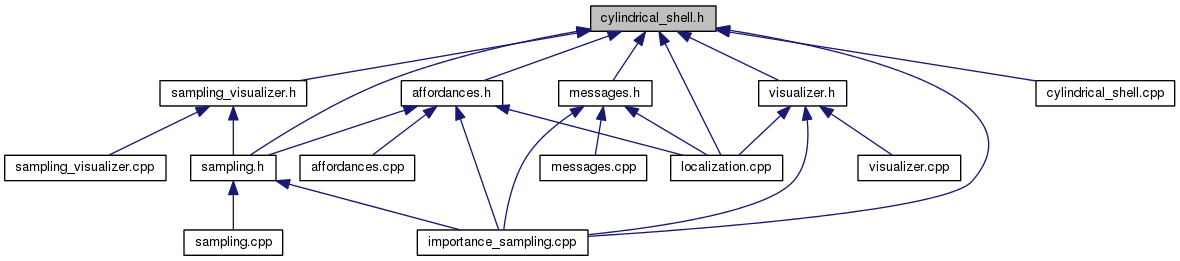
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | CylindricalShell |
| CylindricalShell represents a cylindrical shell that consists of two colinear cylinders. A shell consists of an inner and an outer cylinder. The portion of the object to be grasped must fit inside the inner cylinder, and the radius of that cylinder must be no larger than the maximum hand aperture. The gap between the inner and outer cylinder must be free of obstacles and wide enough to be able to contain the robot fingers. More... | |
Typedefs | |
| typedef pcl::PointCloud < pcl::PointXYZRGBA > | PointCloud |
Typedef Documentation
| typedef pcl::PointCloud<pcl::PointXYZRGBA> PointCloud |
Definition at line 40 of file cylindrical_shell.h.