#include "evarobot_battery/evarobot_battery.h"#include "IMI2C.h"#include "evarobot_battery/LTC2943.h"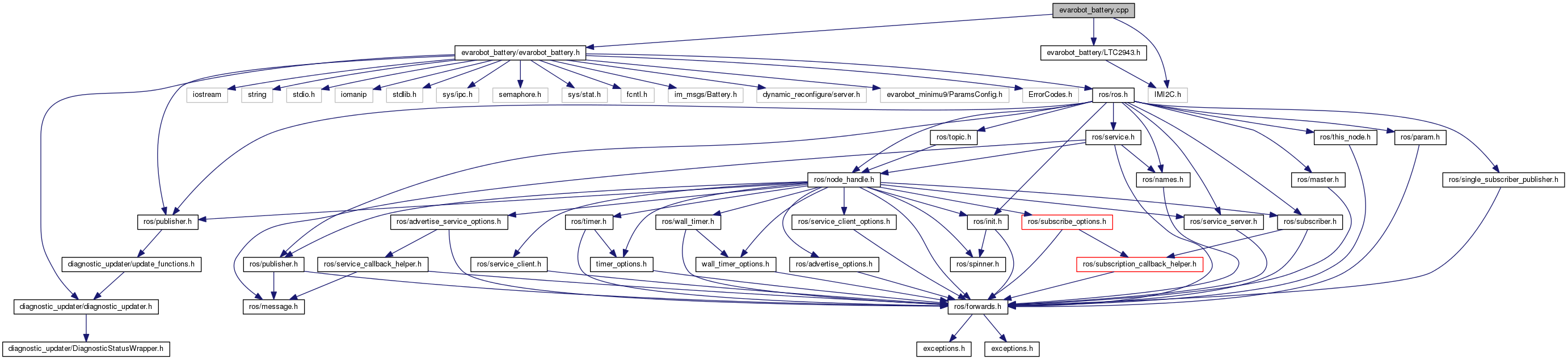
Go to the source code of this file.
Defines | |
| #define | ALERT_MODE 0x04 |
| #define | AUTOMATIC_MODE 0xC0 |
| #define | CHARGE_COMPLETE_MODE 0x02 |
| #define | DISABLE_ALCC_PIN 0x00 |
| #define | MANUAL_MODE 0x40 |
| #define | PRESCALER_1 0x00 |
| #define | PRESCALER_1024 0x28 |
| #define | PRESCALER_16 0x10 |
| #define | PRESCALER_256 0x20 |
| #define | PRESCALER_4 0x08 |
| #define | PRESCALER_4096 0x30 |
| #define | PRESCALER_4096_2 0x31 |
| #define | PRESCALER_64 0x18 |
| #define | SCAN_MODE 0x80 |
| #define | SHUTDOWN_MODE 0x01 |
| #define | SLEEP_MODE 0x00 |
Functions | |
| int | main (int argc, char *argv[]) |
| void | ProduceDiagnostics (diagnostic_updater::DiagnosticStatusWrapper &stat) |
Variables | |
| int | i_error_code = 0 |
Define Documentation
| #define ALERT_MODE 0x04 |
Definition at line 20 of file evarobot_battery.cpp.
| #define AUTOMATIC_MODE 0xC0 |
Definition at line 6 of file evarobot_battery.cpp.
| #define CHARGE_COMPLETE_MODE 0x02 |
Definition at line 21 of file evarobot_battery.cpp.
| #define DISABLE_ALCC_PIN 0x00 |
Definition at line 22 of file evarobot_battery.cpp.
| #define MANUAL_MODE 0x40 |
Definition at line 8 of file evarobot_battery.cpp.
| #define PRESCALER_1 0x00 |
Definition at line 11 of file evarobot_battery.cpp.
| #define PRESCALER_1024 0x28 |
Definition at line 16 of file evarobot_battery.cpp.
| #define PRESCALER_16 0x10 |
Definition at line 13 of file evarobot_battery.cpp.
| #define PRESCALER_256 0x20 |
Definition at line 15 of file evarobot_battery.cpp.
| #define PRESCALER_4 0x08 |
Definition at line 12 of file evarobot_battery.cpp.
| #define PRESCALER_4096 0x30 |
Definition at line 17 of file evarobot_battery.cpp.
| #define PRESCALER_4096_2 0x31 |
Definition at line 18 of file evarobot_battery.cpp.
| #define PRESCALER_64 0x18 |
Definition at line 14 of file evarobot_battery.cpp.
| #define SCAN_MODE 0x80 |
Definition at line 7 of file evarobot_battery.cpp.
| #define SHUTDOWN_MODE 0x01 |
Definition at line 24 of file evarobot_battery.cpp.
| #define SLEEP_MODE 0x00 |
Definition at line 9 of file evarobot_battery.cpp.
Function Documentation
| int main | ( | int | argc, |
| char * | argv[] | ||
| ) |
Definition at line 44 of file evarobot_battery.cpp.
| void ProduceDiagnostics | ( | diagnostic_updater::DiagnosticStatusWrapper & | stat | ) |
Definition at line 31 of file evarobot_battery.cpp.
Variable Documentation
| int i_error_code = 0 |
Definition at line 28 of file evarobot_battery.cpp.