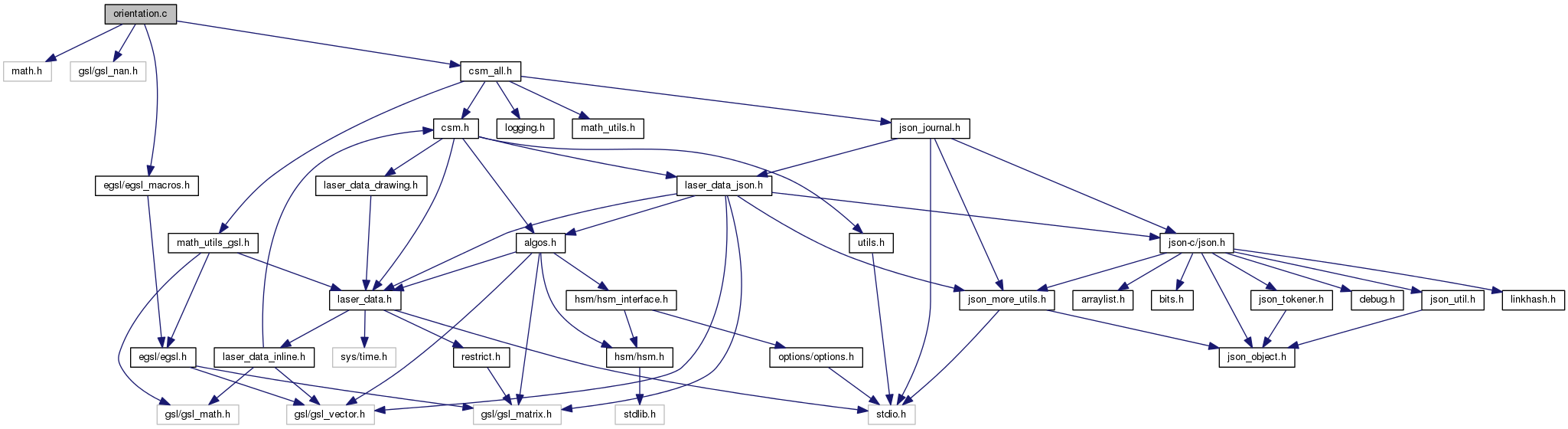
Include dependency graph for orientation.c:
Go to the source code of this file.
Functions | |
| void | filter_orientation (double theta0, double rho0, size_t n, const double *thetas, const double *rhos, double *alpha, double *cov0_alpha) |
| void | find_neighbours (LDP ld, int i, int max_num, int *indexes, size_t *num_found) |
| void | ld_compute_orientation (LDP ld, int size_neighbourhood, double sigma) |
Function Documentation
| void filter_orientation | ( | double | theta0, |
| double | rho0, | ||
| size_t | n, | ||
| const double * | thetas, | ||
| const double * | rhos, | ||
| double * | alpha, | ||
| double * | cov0_alpha | ||
| ) |
A very cool algorithm for finding the orientation
Definition at line 64 of file orientation.c.
| void find_neighbours | ( | LDP | ld, |
| int | i, | ||
| int | max_num, | ||
| int * | indexes, | ||
| size_t * | num_found | ||
| ) |
Definition at line 132 of file orientation.c.
| void ld_compute_orientation | ( | LDP | ld, |
| int | size_neighbourhood, | ||
| double | sigma | ||
| ) |
Requires the "cluster" field to be set
Definition at line 14 of file orientation.c.