Joint interpolation planner for moveit. More...
#include <joint_interpolation_planner.h>
Public Member Functions | |
| void | clear () override |
| Clear planner data. | |
| EIGEN_MAKE_ALIGNED_OPERATOR_NEW | JointInterpolationPlanner (const std::string &name, const std::string &group) |
| JointInterpolationPlanner Constructor. | |
| JointInterpolationPlanner (const JointInterpolationPlanner &other) | |
| JointInterpolationPlanner Copy Constructor. | |
| bool | solve (planning_interface::MotionPlanResponse &res) override |
| Generate a joint interpolated trajectory. | |
| bool | solve (planning_interface::MotionPlanDetailedResponse &res) override |
| Generate a joint interpolated trajectory. | |
| bool | terminate () override |
| Terminate the active planner solve. | |
Private Attributes | |
| boost::atomic< bool > | terminate_ |
Detailed Description
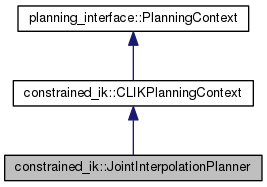
Joint interpolation planner for moveit.
This class is used to represent a joint interpolated path planner for moveit. This planner does not have the inherent ability to avoid collision. It does check if the path created is collision free before it returns a trajectory. If a collision is found it returns an empty trajectory and moveit error.
Definition at line 51 of file joint_interpolation_planner.h.
Constructor & Destructor Documentation
| EIGEN_MAKE_ALIGNED_OPERATOR_NEW constrained_ik::JointInterpolationPlanner::JointInterpolationPlanner | ( | const std::string & | name, |
| const std::string & | group | ||
| ) | [inline] |
JointInterpolationPlanner Constructor.
- Parameters:
-
name of planner group of the planner
Definition at line 61 of file joint_interpolation_planner.h.
| constrained_ik::JointInterpolationPlanner::JointInterpolationPlanner | ( | const JointInterpolationPlanner & | other | ) | [inline] |
JointInterpolationPlanner Copy Constructor.
- Parameters:
-
other joint interpolation planner
Definition at line 67 of file joint_interpolation_planner.h.
Member Function Documentation
| bool constrained_ik::JointInterpolationPlanner::solve | ( | planning_interface::MotionPlanResponse & | res | ) | [override, virtual] |
Generate a joint interpolated trajectory.
- Parameters:
-
res planner response
- Returns:
Implements constrained_ik::CLIKPlanningContext.
Definition at line 55 of file joint_interpolation_planner.cpp.
| bool constrained_ik::JointInterpolationPlanner::solve | ( | planning_interface::MotionPlanDetailedResponse & | res | ) | [override, virtual] |
Generate a joint interpolated trajectory.
- Parameters:
-
res planner detailed response
- Returns:
Implements constrained_ik::CLIKPlanningContext.
Definition at line 41 of file joint_interpolation_planner.cpp.
| bool constrained_ik::JointInterpolationPlanner::terminate | ( | ) | [inline, override, virtual] |
Terminate the active planner solve.
- Returns:
- True if successfully terminated, otherwise false
Implements constrained_ik::CLIKPlanningContext.
Definition at line 76 of file joint_interpolation_planner.h.
Member Data Documentation
boost::atomic<bool> constrained_ik::JointInterpolationPlanner::terminate_ [private] |
Termination flag
Definition at line 97 of file joint_interpolation_planner.h.
The documentation for this class was generated from the following files: