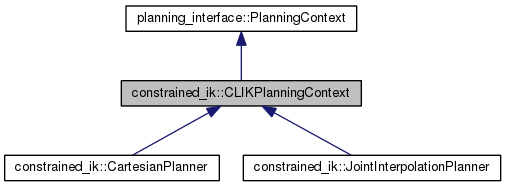
This is a virtual class that is inherited by all of the CLIK planner. It containes CLIK specific functions used by each of the CLIK planners. More...
#include <constrained_ik_planning_context.h>
Public Member Functions | |
| void | clear () override=0 |
| Clear the planner data. | |
| EIGEN_MAKE_ALIGNED_OPERATOR_NEW | CLIKPlanningContext (const std::string &name, const std::string &group) |
| CartesianPlanner Constructor. | |
| virtual void | resetPlannerConfiguration () |
| resetConfiguration - Resets configuration parameters to their default values. | |
| virtual void | setPlannerConfiguration (const CLIKPlannerDynamicConfig &config) |
| setConfiguration - Sets/Updates planner parameters. | |
| bool | solve (planning_interface::MotionPlanResponse &res) override=0 |
| Solve for the provided request. | |
| bool | solve (planning_interface::MotionPlanDetailedResponse &res) override=0 |
| Solve for the provided request. | |
| bool | terminate () override=0 |
| Terminate the active planner solve. | |
Protected Attributes | |
| CLIKPlannerDynamicConfig | config_ |
Detailed Description
This is a virtual class that is inherited by all of the CLIK planner. It containes CLIK specific functions used by each of the CLIK planners.
Definition at line 40 of file constrained_ik_planning_context.h.
Constructor & Destructor Documentation
| EIGEN_MAKE_ALIGNED_OPERATOR_NEW constrained_ik::CLIKPlanningContext::CLIKPlanningContext | ( | const std::string & | name, |
| const std::string & | group | ||
| ) | [inline] |
CartesianPlanner Constructor.
- Parameters:
-
name of planner group of the planner
Definition at line 50 of file constrained_ik_planning_context.h.
Member Function Documentation
| virtual void constrained_ik::CLIKPlanningContext::setPlannerConfiguration | ( | const CLIKPlannerDynamicConfig & | config | ) | [inline, virtual] |
setConfiguration - Sets/Updates planner parameters.
- Parameters:
-
config - Parameters used by the CLIK planners
Definition at line 79 of file constrained_ik_planning_context.h.
| bool constrained_ik::CLIKPlanningContext::solve | ( | planning_interface::MotionPlanResponse & | res | ) | [override, pure virtual] |
Solve for the provided request.
- Parameters:
-
res planner response
- Returns:
- wether successfull
Implements planning_interface::PlanningContext.
Implemented in constrained_ik::CartesianPlanner, and constrained_ik::JointInterpolationPlanner.
| bool constrained_ik::CLIKPlanningContext::solve | ( | planning_interface::MotionPlanDetailedResponse & | res | ) | [override, pure virtual] |
Solve for the provided request.
- Parameters:
-
res planner detailed response
- Returns:
- wether successfull
Implements planning_interface::PlanningContext.
Implemented in constrained_ik::CartesianPlanner, and constrained_ik::JointInterpolationPlanner.
| bool constrained_ik::CLIKPlanningContext::terminate | ( | ) | [override, pure virtual] |
Terminate the active planner solve.
- Returns:
- wether successfull
Implements planning_interface::PlanningContext.
Implemented in constrained_ik::CartesianPlanner, and constrained_ik::JointInterpolationPlanner.
Member Data Documentation
CLIKPlannerDynamicConfig constrained_ik::CLIKPlanningContext::config_ [protected] |
Store the parameters for the CLIK planners.
Definition at line 85 of file constrained_ik_planning_context.h.
The documentation for this class was generated from the following file: