Include dependency graph for UndercarriageCtrlGeomROS.h:

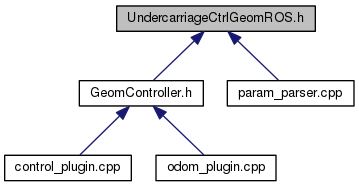
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Namespaces | |
| namespace | cob_omni_drive_controller |
Functions | |
| bool | cob_omni_drive_controller::parseWheelParams (std::vector< UndercarriageGeom::WheelParams > ¶ms, const ros::NodeHandle &nh, bool read_urdf=true) |
| bool | cob_omni_drive_controller::parseWheelParams (std::vector< UndercarriageDirectCtrl::WheelParams > ¶ms, const ros::NodeHandle &nh, bool read_urdf=true) |
| bool | cob_omni_drive_controller::parseWheelParams (std::vector< UndercarriageCtrl::WheelParams > ¶ms, const ros::NodeHandle &nh, bool read_urdf=true) |