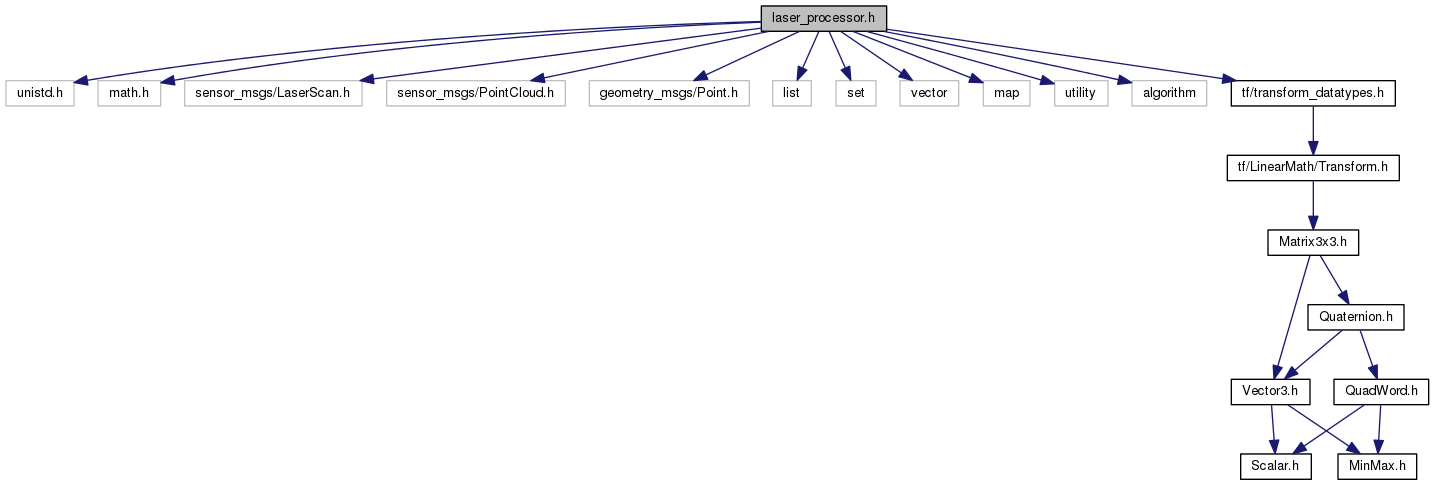
#include <unistd.h>#include <math.h>#include "sensor_msgs/LaserScan.h"#include "sensor_msgs/PointCloud.h"#include "geometry_msgs/Point.h"#include <list>#include <set>#include <vector>#include <map>#include <utility>#include <algorithm>#include "tf/transform_datatypes.h"
Include dependency graph for laser_processor.h:
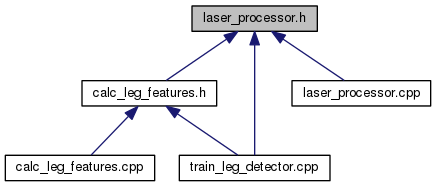
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| struct | laser_processor::CompareSample |
| The comparator allowing the creation of an ordered "SampleSet". More... | |
| class | laser_processor::Sample |
| A struct representing a single sample from the laser. More... | |
| class | laser_processor::SampleSet |
| An ordered set of Samples. More... | |
| class | laser_processor::ScanMask |
| A mask for filtering out Samples based on range. More... | |
| class | laser_processor::ScanProcessor |
Namespaces | |
| namespace | laser_processor |
A namespace containing the laser processor helper classes. | |