#include <vector>#include <ros/ros.h>#include <cob_cartesian_controller/cartesian_controller_data_types.h>#include <cob_cartesian_controller/cartesian_controller_utils.h>
Include dependency graph for trajectory_profile_generator_base.h:

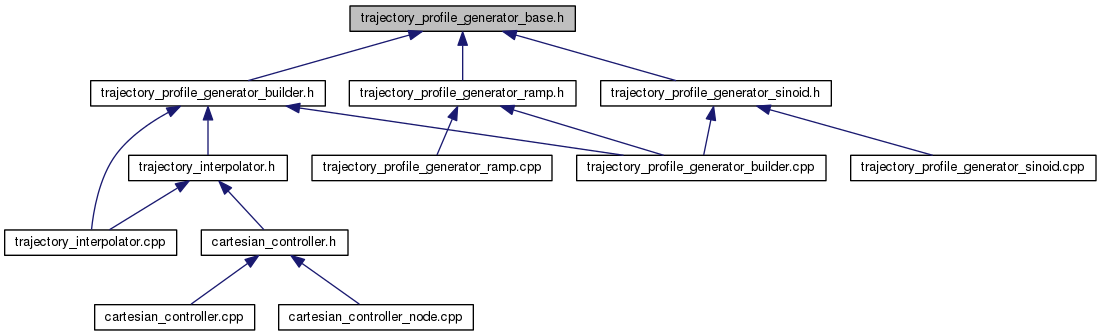
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | TrajectoryProfileBase |
Defines | |
| #define | MIN_VELOCITY_THRESHOLD 0.001 |
Define Documentation
| #define MIN_VELOCITY_THRESHOLD 0.001 |
Definition at line 27 of file trajectory_profile_generator_base.h.