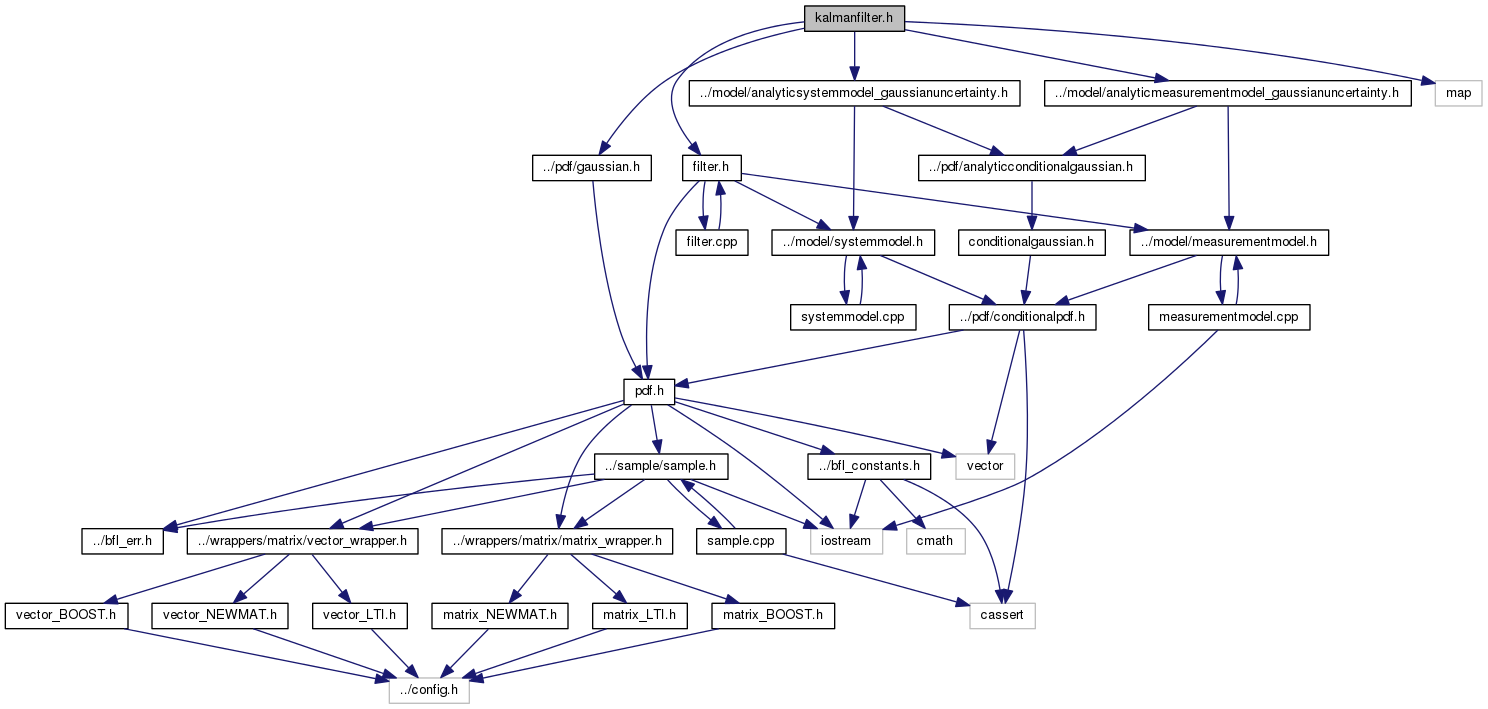
#include "filter.h"#include "../pdf/gaussian.h"#include "../model/analyticmeasurementmodel_gaussianuncertainty.h"#include "../model/analyticsystemmodel_gaussianuncertainty.h"#include <map>
Include dependency graph for kalmanfilter.h:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Classes | |
| class | BFL::KalmanFilter |
| Class representing the family of all Kalman Filters (EKF, IEKF, ...) More... | |
| struct | BFL::KalmanFilter::MeasUpdateVariables |
Namespaces | |
| namespace | BFL |