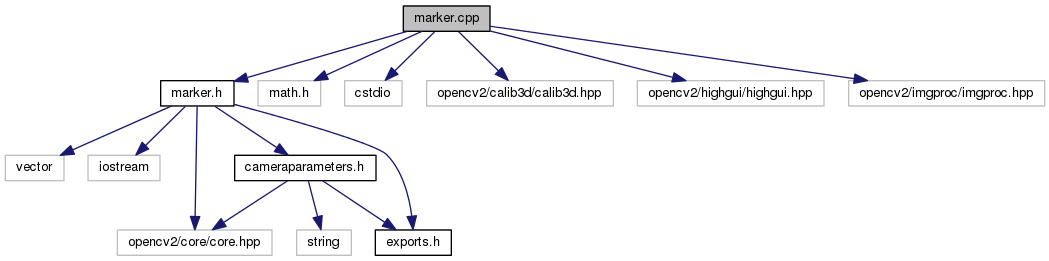
#include "marker.h"#include <math.h>#include <cstdio>#include <opencv2/calib3d/calib3d.hpp>#include <opencv2/highgui/highgui.hpp>#include <opencv2/imgproc/imgproc.hpp>
Include dependency graph for marker.cpp:
Go to the source code of this file.
Namespaces | |
| namespace | aruco |
Defines | |
| #define | _USE_MATH_DEFINES |
Functions | |
| void | aruco::print (cv::Point3f p, string cad) |
Define Documentation
| #define _USE_MATH_DEFINES |
Definition at line 29 of file marker.cpp.