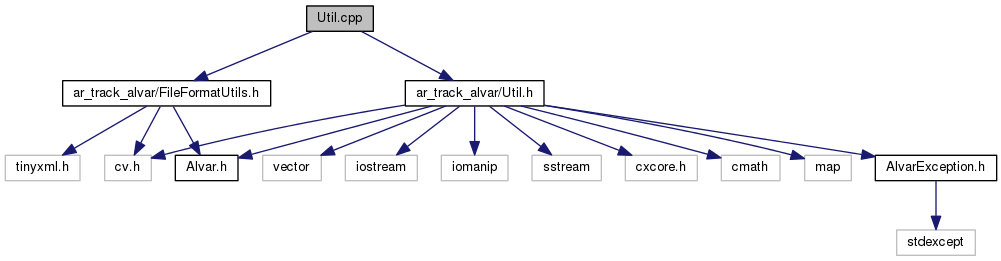
Include dependency graph for Util.cpp:
Go to the source code of this file.
Classes | |
| struct | alvar::SerializationFormatterXml |
Namespaces | |
| namespace | alvar |
Main ALVAR namespace. | |
Functions | |
| double ALVAR_EXPORT | alvar::angle (CvPoint *A, CvPoint *B, CvPoint *C, CvPoint *D, int isDirectionDependent) |
| Computes the angle between lines AB and CD. | |
| int ALVAR_EXPORT | alvar::cross (CvPoint *A, CvPoint *B, CvPoint *C) |
| Computes the cross product AB x AC. | |
| double ALVAR_EXPORT | alvar::distance (CvPoint *A, CvPoint *B) |
| Compute the distance from A to B. | |
| int ALVAR_EXPORT | alvar::dot (CvPoint *A, CvPoint *B, CvPoint *C) |
| Computes dot product AB.BC. | |
| int | alvar::exp_filt2 (vector< double > &v, vector< double > &ret, bool clamp) |
| int | alvar::find_zero_crossings (const vector< double > &v, vector< int > &corners, int offs) |
| void | alvar::FitCVEllipse (const vector< PointDouble > &points, CvBox2D &ellipse_box) |
| double ALVAR_EXPORT | alvar::Limit (double val, double min_val, double max_val) |
| Limits a number to between two values. | |
| double ALVAR_EXPORT | alvar::linePointDist (CvPoint *A, CvPoint *B, CvPoint *C, bool isSegment) |
| Computes the distance from point C to line (segment) AB. | |
| void ALVAR_EXPORT | alvar::out_matrix (const CvMat *m, const char *name) |
| Output OpenCV matrix for debug purposes. | |
| double ALVAR_EXPORT | alvar::polyLinePointDist (CvPoint *PointList, int nPnts, CvPoint *C, int *index, int isClosedPolygon) |
| Calculates minimum distance from Point C to Polygon whose points are in list PointList. | |