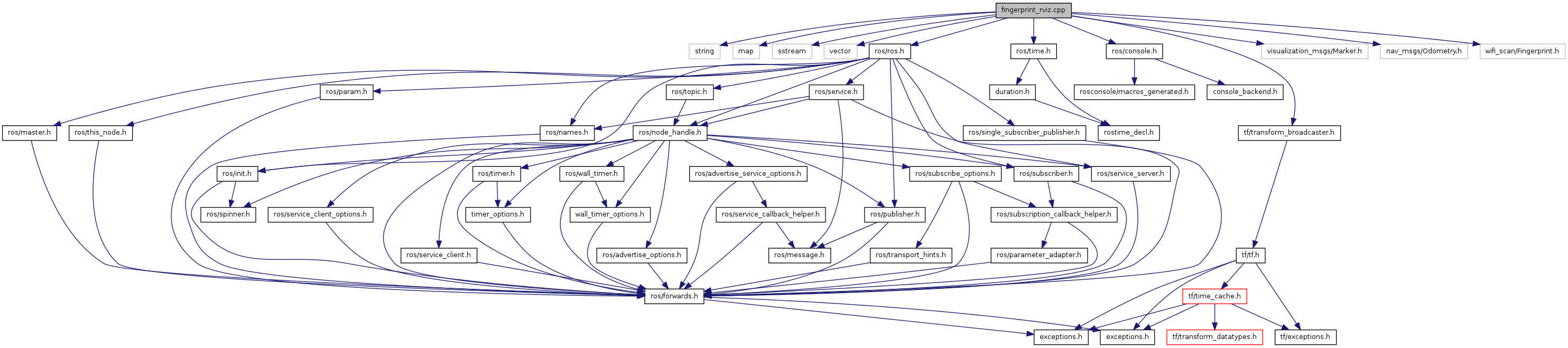
#include <string>#include <map>#include <sstream>#include <vector>#include <ros/ros.h>#include <ros/time.h>#include <ros/console.h>#include <tf/transform_broadcaster.h>#include <visualization_msgs/Marker.h>#include <nav_msgs/Odometry.h>#include <wifi_scan/Fingerprint.h>
Include dependency graph for fingerprint_rviz.cpp:
Go to the source code of this file.
Classes | |
| class | FingerprintRviz |
| This is in fact the callback for when fingerprint messages are available. More... | |
Namespaces | |
| namespace | jet |
Functions | |
| double | jet::base (double val) |
| double | jet::blue (double gray) |
| double | jet::green (double gray) |
| double | jet::interpolate (double val, double y0, double x0, double y1, double x1) |
| int | main (int argc, char **argv) |
| Create a ROS node that subscribes to the /wifi_fp topic and vizualizes this information. | |
| double | jet::red (double gray) |
Function Documentation
| int main | ( | int | argc, |
| char ** | argv | ||
| ) |
Create a ROS node that subscribes to the /wifi_fp topic and vizualizes this information.
This is the main function to set up the ROS node.
Definition at line 240 of file fingerprint_rviz.cpp.