Demonstrate how to read analogue data with RoNeX. More...
#include <string>#include <ros/ros.h>#include <ros/console.h>#include <boost/lexical_cast.hpp>#include "sr_ronex_msgs/GeneralIOState.h"#include "sr_ronex_utilities/sr_ronex_utilities.hpp"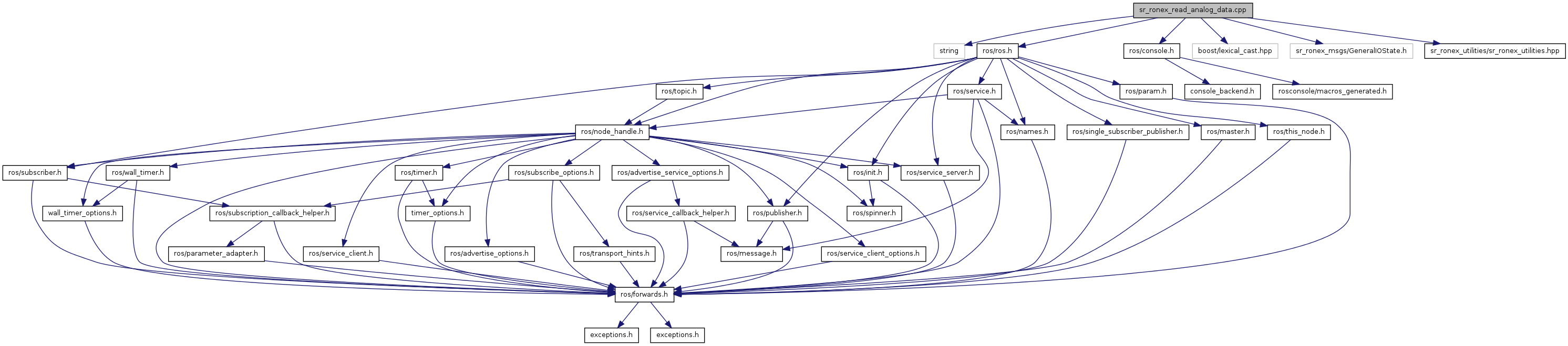
Go to the source code of this file.
Classes | |
| class | SrRonexFindGeneralIOModule |
Functions | |
| void | generalIOState_callback (const sr_ronex_msgs::GeneralIOState::ConstPtr &msg) |
| int | main (int argc, char **argv) |
Detailed Description
Demonstrate how to read analogue data with RoNeX.
Definition in file sr_ronex_read_analog_data.cpp.
Function Documentation
| void generalIOState_callback | ( | const sr_ronex_msgs::GeneralIOState::ConstPtr & | msg | ) |
The callback function given to the subscribe() call.
- Parameters:
-
msg A const pointer to a message of type sr_ronex_msgs::GeneralIOState.
Definition at line 104 of file sr_ronex_read_analog_data.cpp.
| int main | ( | int | argc, |
| char ** | argv | ||
| ) |
This class demonstrates how to read analogue data with RoNeX.
The subscribe() call is how you tell ROS that you want to receive messages on a given topic. Messages are passed to a callback function. The second parameter to the subscribe() function is the size of the message queue.
ros::spin() will enter a loop, pumping callbacks. With this version, all callbacks will be called from within this thread (the main one). ros::spin() will exit when Ctrl-C is pressed, or the node is shutdown by the master.
Definition at line 117 of file sr_ronex_read_analog_data.cpp.