A FailedViewController instance represents a ViewController class we tried and failed to instantiate. More...
#include <failed_view_controller.h>
Public Member Functions | |
| FailedViewController (const QString &desired_class_id, const QString &error_message) | |
| virtual QString | getDescription () const |
| Return the description. | |
| virtual void | load (const Config &config) |
| Store the given Config data for later, so we can return it with save() when someone writes this back to a file. | |
| virtual void | lookAt (const Ogre::Vector3 &point) |
| This should be implemented in each subclass to aim the camera at the given point in space (relative to the fixed frame). | |
| virtual void | onActivate () |
| called by activate(). | |
| virtual int | processMouseEvent (ViewportMouseEvent &event) |
| virtual void | reset () |
| virtual void | save (Config config) const |
| Write into config data equivalent to the last config sent to load(). | |
Private Attributes | |
| QString | error_message_ |
| Config | saved_config_ |
Detailed Description
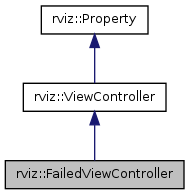
A FailedViewController instance represents a ViewController class we tried and failed to instantiate.
FailedViewController stores the class id which it was supposed to be, and an error message describing the failure.
The load() and save() functions work together to ensure that loaded configuration data is saved out again without modification. This ensures that running rviz with a missing plugin library won't damage config files which refer to it.
Definition at line 47 of file failed_view_controller.h.
Constructor & Destructor Documentation
| rviz::FailedViewController::FailedViewController | ( | const QString & | desired_class_id, |
| const QString & | error_message | ||
| ) |
Definition at line 40 of file failed_view_controller.cpp.
Member Function Documentation
| QString rviz::FailedViewController::getDescription | ( | ) | const [virtual] |
Return the description.
Reimplemented from rviz::Property.
Definition at line 46 of file failed_view_controller.cpp.
| void rviz::FailedViewController::load | ( | const Config & | config | ) | [virtual] |
Store the given Config data for later, so we can return it with save() when someone writes this back to a file.
Reimplemented from rviz::ViewController.
Definition at line 51 of file failed_view_controller.cpp.
| virtual void rviz::FailedViewController::lookAt | ( | const Ogre::Vector3 & | point | ) | [inline, virtual] |
This should be implemented in each subclass to aim the camera at the given point in space (relative to the fixed frame).
Reimplemented from rviz::ViewController.
Definition at line 65 of file failed_view_controller.h.
| void rviz::FailedViewController::onActivate | ( | ) | [virtual] |
called by activate().
Override to implement view-specific activation. This base implementation does nothing.
Reimplemented from rviz::ViewController.
Definition at line 69 of file failed_view_controller.cpp.
| virtual int rviz::FailedViewController::processMouseEvent | ( | ViewportMouseEvent & | event | ) | [inline, virtual] |
Definition at line 56 of file failed_view_controller.h.
| virtual void rviz::FailedViewController::reset | ( | ) | [inline, virtual] |
Reset the view controller to some sane initial state, like looking at 0,0,0 from a few meters away.
Implements rviz::ViewController.
Definition at line 66 of file failed_view_controller.h.
| void rviz::FailedViewController::save | ( | Config | config | ) | const [virtual] |
Write into config data equivalent to the last config sent to load().
Reimplemented from rviz::ViewController.
Definition at line 57 of file failed_view_controller.cpp.
Member Data Documentation
QString rviz::FailedViewController::error_message_ [private] |
Definition at line 70 of file failed_view_controller.h.
Definition at line 69 of file failed_view_controller.h.
The documentation for this class was generated from the following files: