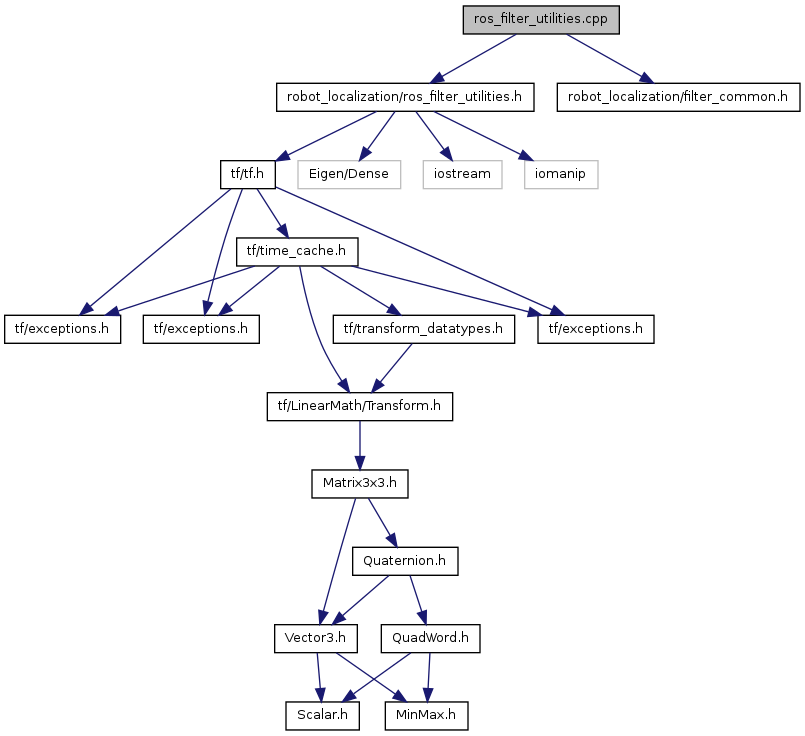
Include dependency graph for ros_filter_utilities.cpp:
Go to the source code of this file.
Namespaces | |
| namespace | RobotLocalization |
| namespace | RobotLocalization::RosFilterUtilities |
Functions | |
| std::ostream & | operator<< (std::ostream &os, const tf::Vector3 &vec) |
| std::ostream & | operator<< (std::ostream &os, const tf::Quaternion &quat) |
| std::ostream & | operator<< (std::ostream &os, const tf::Transform &trans) |
| void | RobotLocalization::RosFilterUtilities::quatToRPY (const tf::Quaternion &quat, double &roll, double &pitch, double &yaw) |
| Utility method for converting quaternion to RPY. | |
| void | RobotLocalization::RosFilterUtilities::stateToTF (const Eigen::VectorXd &state, tf::Transform &stateTF) |
| Converts our Eigen state vector into a TF transform/pose. | |
| void | RobotLocalization::RosFilterUtilities::TFtoState (const tf::Transform &stateTF, Eigen::VectorXd &state) |
| Converts a TF transform/pose into our Eigen state vector. | |
Function Documentation
| std::ostream& operator<< | ( | std::ostream & | os, |
| const tf::Vector3 & | vec | ||
| ) |
Definition at line 36 of file ros_filter_utilities.cpp.
| std::ostream& operator<< | ( | std::ostream & | os, |
| const tf::Quaternion & | quat | ||
| ) |
Definition at line 43 of file ros_filter_utilities.cpp.
| std::ostream& operator<< | ( | std::ostream & | os, |
| const tf::Transform & | trans | ||
| ) |
Definition at line 54 of file ros_filter_utilities.cpp.