ExtractIndices extracts a set of indices from a PointCloud as a separate PointCloud. More...
#include <extract_indices.h>
Protected Member Functions | |
| virtual bool | child_init (ros::NodeHandle &nh, bool &has_service) |
| Child initialization routine. | |
| void | config_callback (pcl_ros::ExtractIndicesConfig &config, uint32_t level) |
| Dynamic reconfigure service callback. | |
| void | filter (const PointCloud2::ConstPtr &input, const IndicesPtr &indices, PointCloud2 &output) |
| Call the actual filter. | |
Protected Attributes | |
| boost::shared_ptr < dynamic_reconfigure::Server < pcl_ros::ExtractIndicesConfig > > | srv_ |
| Pointer to a dynamic reconfigure service. | |
Private Attributes | |
| pcl::ExtractIndices < pcl::PCLPointCloud2 > | impl_ |
| The PCL filter implementation used. | |
Detailed Description
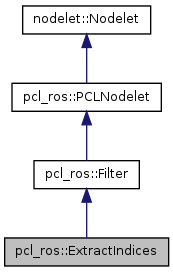
ExtractIndices extracts a set of indices from a PointCloud as a separate PointCloud.
- Note:
- setFilterFieldName (), setFilterLimits (), and setFilterLimitNegative () are ignored.
Definition at line 53 of file extract_indices.h.
Member Function Documentation
| bool pcl_ros::ExtractIndices::child_init | ( | ros::NodeHandle & | nh, |
| bool & | has_service | ||
| ) | [protected, virtual] |
Child initialization routine.
- Parameters:
-
nh ROS node handle has_service set to true if the child has a Dynamic Reconfigure service
Reimplemented from pcl_ros::Filter.
Definition at line 43 of file extract_indices.cpp.
| void pcl_ros::ExtractIndices::config_callback | ( | pcl_ros::ExtractIndicesConfig & | config, |
| uint32_t | level | ||
| ) | [protected] |
Dynamic reconfigure service callback.
Definition at line 57 of file extract_indices.cpp.
| void pcl_ros::ExtractIndices::filter | ( | const PointCloud2::ConstPtr & | input, |
| const IndicesPtr & | indices, | ||
| PointCloud2 & | output | ||
| ) | [inline, protected, virtual] |
Call the actual filter.
- Parameters:
-
input the input point cloud dataset indices the input set of indices to use from input output the resultant filtered dataset
Implements pcl_ros::Filter.
Definition at line 65 of file extract_indices.h.
Member Data Documentation
pcl::ExtractIndices<pcl::PCLPointCloud2> pcl_ros::ExtractIndices::impl_ [private] |
The PCL filter implementation used.
Definition at line 91 of file extract_indices.h.
boost::shared_ptr<dynamic_reconfigure::Server<pcl_ros::ExtractIndicesConfig> > pcl_ros::ExtractIndices::srv_ [protected] |
Pointer to a dynamic reconfigure service.
Reimplemented from pcl_ros::Filter.
Definition at line 57 of file extract_indices.h.
The documentation for this class was generated from the following files: