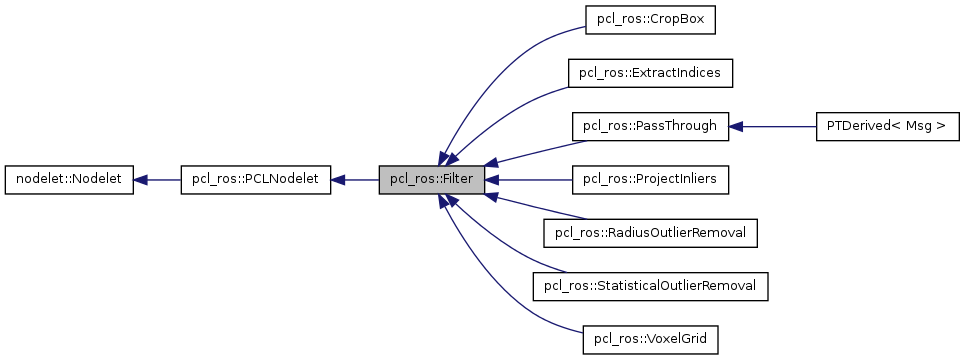
Filter represents the base filter class. Some generic 3D operations that are applicable to all filters are defined here as static methods. More...
#include <filter.h>
Public Types | |
| typedef boost::shared_ptr < const std::vector< int > > | IndicesConstPtr |
| typedef boost::shared_ptr < std::vector< int > > | IndicesPtr |
| typedef sensor_msgs::PointCloud2 | PointCloud2 |
Public Member Functions | |
| Filter () | |
Protected Member Functions | |
| virtual bool | child_init (ros::NodeHandle &nh, bool &has_service) |
| Child initialization routine. | |
| void | computePublish (const PointCloud2::ConstPtr &input, const IndicesPtr &indices) |
| Call the child filter () method, optionally transform the result, and publish it. | |
| virtual void | filter (const PointCloud2::ConstPtr &input, const IndicesPtr &indices, PointCloud2 &output)=0 |
| Virtual abstract filter method. To be implemented by every child. | |
| virtual void | onInit () |
| Nodelet initialization routine. | |
Protected Attributes | |
| std::string | filter_field_name_ |
| The desired user filter field name. | |
| double | filter_limit_max_ |
| The maximum allowed filter value a point will be considered from. | |
| double | filter_limit_min_ |
| The minimum allowed filter value a point will be considered from. | |
| bool | filter_limit_negative_ |
| Set to true if we want to return the data outside (filter_limit_min_;filter_limit_max_). Default: false. | |
| boost::mutex | mutex_ |
| Internal mutex. | |
| ros::Subscriber | sub_input_ |
| The input PointCloud subscriber. | |
| message_filters::Subscriber < PointCloud2 > | sub_input_filter_ |
| The message filter subscriber for PointCloud2. | |
| std::string | tf_input_frame_ |
| The input TF frame the data should be transformed into, if input.header.frame_id is different. | |
| std::string | tf_input_orig_frame_ |
| The original data input TF frame. | |
| std::string | tf_output_frame_ |
| The output TF frame the data should be transformed into, if input.header.frame_id is different. | |
Private Member Functions | |
| virtual void | config_callback (pcl_ros::FilterConfig &config, uint32_t level) |
| Dynamic reconfigure service callback. | |
| void | input_indices_callback (const PointCloud2::ConstPtr &cloud, const PointIndicesConstPtr &indices) |
| PointCloud2 + Indices data callback. | |
Private Attributes | |
| boost::shared_ptr < dynamic_reconfigure::Server < pcl_ros::FilterConfig > > | srv_ |
| Pointer to a dynamic reconfigure service. | |
| boost::shared_ptr < message_filters::Synchronizer < sync_policies::ApproximateTime < PointCloud2, PointIndices > > > | sync_input_indices_a_ |
| boost::shared_ptr < message_filters::Synchronizer < sync_policies::ExactTime < PointCloud2, PointIndices > > > | sync_input_indices_e_ |
| Synchronized input, and indices. | |
Detailed Description
Filter represents the base filter class. Some generic 3D operations that are applicable to all filters are defined here as static methods.
Member Typedef Documentation
| typedef boost::shared_ptr<const std::vector<int> > pcl_ros::Filter::IndicesConstPtr |
Reimplemented from pcl_ros::PCLNodelet.
| typedef boost::shared_ptr<std::vector<int> > pcl_ros::Filter::IndicesPtr |
Reimplemented from pcl_ros::PCLNodelet.
| typedef sensor_msgs::PointCloud2 pcl_ros::Filter::PointCloud2 |
Reimplemented from pcl_ros::PCLNodelet.
Constructor & Destructor Documentation
| pcl_ros::Filter::Filter | ( | ) | [inline] |
Member Function Documentation
| virtual bool pcl_ros::Filter::child_init | ( | ros::NodeHandle & | nh, |
| bool & | has_service | ||
| ) | [inline, protected, virtual] |
Child initialization routine.
- Parameters:
-
nh ROS node handle has_service set to true if the child has a Dynamic Reconfigure service
Reimplemented in pcl_ros::StatisticalOutlierRemoval, pcl_ros::CropBox, pcl_ros::ExtractIndices, pcl_ros::RadiusOutlierRemoval, pcl_ros::PassThrough, and pcl_ros::VoxelGrid.
| void Filter::computePublish | ( | const PointCloud2::ConstPtr & | input, |
| const IndicesPtr & | indices | ||
| ) | [protected] |
Call the child filter () method, optionally transform the result, and publish it.
- Parameters:
-
input the input point cloud dataset. indices a pointer to the vector of point indices to use.
Definition at line 64 of file filter.cpp.
| void Filter::config_callback | ( | pcl_ros::FilterConfig & | config, |
| uint32_t | level | ||
| ) | [private, virtual] |
Dynamic reconfigure service callback.
Reimplemented in pcl_ros::PassThrough.
Definition at line 159 of file filter.cpp.
| virtual void pcl_ros::Filter::filter | ( | const PointCloud2::ConstPtr & | input, |
| const IndicesPtr & | indices, | ||
| PointCloud2 & | output | ||
| ) | [protected, pure virtual] |
Virtual abstract filter method. To be implemented by every child.
- Parameters:
-
input the input point cloud dataset. indices a pointer to the vector of point indices to use. output the resultant filtered PointCloud2
Implemented in pcl_ros::StatisticalOutlierRemoval, pcl_ros::CropBox, pcl_ros::ProjectInliers, pcl_ros::RadiusOutlierRemoval, pcl_ros::VoxelGrid, pcl_ros::ExtractIndices, and pcl_ros::PassThrough.
| void Filter::input_indices_callback | ( | const PointCloud2::ConstPtr & | cloud, |
| const PointIndicesConstPtr & | indices | ||
| ) | [private] |
| void Filter::onInit | ( | ) | [protected, virtual] |
Nodelet initialization routine.
Reimplemented from pcl_ros::PCLNodelet.
Reimplemented in pcl_ros::ProjectInliers.
Definition at line 107 of file filter.cpp.
Member Data Documentation
std::string pcl_ros::Filter::filter_field_name_ [protected] |
double pcl_ros::Filter::filter_limit_max_ [protected] |
double pcl_ros::Filter::filter_limit_min_ [protected] |
bool pcl_ros::Filter::filter_limit_negative_ [protected] |
boost::mutex pcl_ros::Filter::mutex_ [protected] |
boost::shared_ptr<dynamic_reconfigure::Server<pcl_ros::FilterConfig> > pcl_ros::Filter::srv_ [private] |
Pointer to a dynamic reconfigure service.
Reimplemented in pcl_ros::StatisticalOutlierRemoval, pcl_ros::CropBox, pcl_ros::RadiusOutlierRemoval, pcl_ros::ExtractIndices, pcl_ros::VoxelGrid, and pcl_ros::PassThrough.
ros::Subscriber pcl_ros::Filter::sub_input_ [protected] |
The message filter subscriber for PointCloud2.
Reimplemented from pcl_ros::PCLNodelet.
boost::shared_ptr<message_filters::Synchronizer<sync_policies::ApproximateTime<PointCloud2, PointIndices> > > pcl_ros::Filter::sync_input_indices_a_ [private] |
boost::shared_ptr<message_filters::Synchronizer<sync_policies::ExactTime<PointCloud2, PointIndices> > > pcl_ros::Filter::sync_input_indices_e_ [private] |
std::string pcl_ros::Filter::tf_input_frame_ [protected] |
std::string pcl_ros::Filter::tf_input_orig_frame_ [protected] |
std::string pcl_ros::Filter::tf_output_frame_ [protected] |
The documentation for this class was generated from the following files: