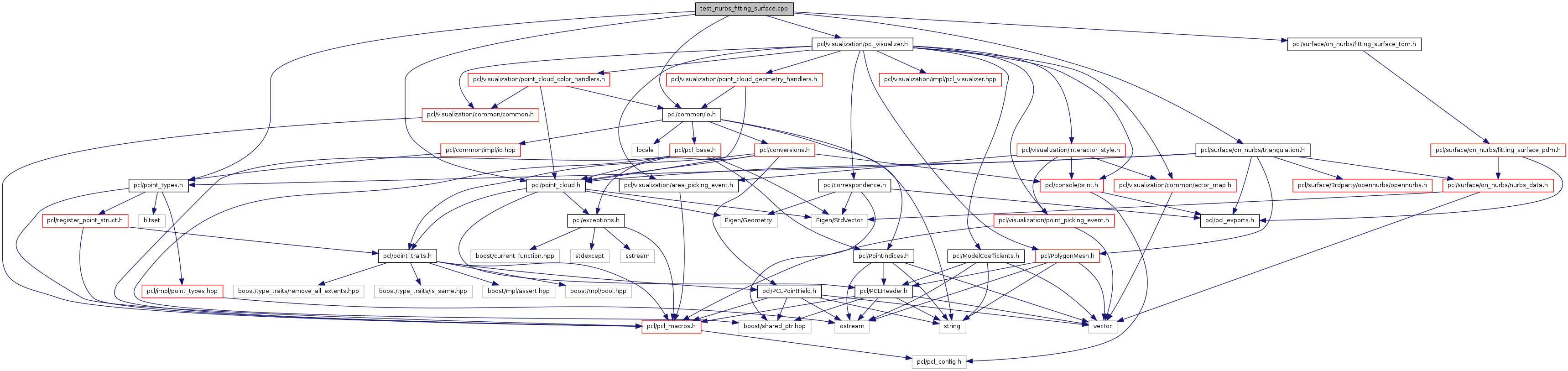
#include <pcl/point_cloud.h>#include <pcl/point_types.h>#include <pcl/common/io.h>#include <pcl/visualization/pcl_visualizer.h>#include <pcl/surface/on_nurbs/fitting_surface_tdm.h>#include <pcl/surface/on_nurbs/triangulation.h>
Include dependency graph for test_nurbs_fitting_surface.cpp:
Go to the source code of this file.
Typedefs | |
| typedef pcl::PointXYZ | Point |
Functions | |
| void | CreateCylinderPoints (pcl::PointCloud< Point >::Ptr cloud, pcl::on_nurbs::vector_vec3d &data, unsigned npoints, double alpha, double h, double r) |
| int | main () |
Typedef Documentation
| typedef pcl::PointXYZ Point |
Definition at line 9 of file test_nurbs_fitting_surface.cpp.
Function Documentation
| void CreateCylinderPoints | ( | pcl::PointCloud< Point >::Ptr | cloud, |
| pcl::on_nurbs::vector_vec3d & | data, | ||
| unsigned | npoints, | ||
| double | alpha, | ||
| double | h, | ||
| double | r | ||
| ) |
Definition at line 12 of file test_nurbs_fitting_surface.cpp.
| int main | ( | ) |
Definition at line 31 of file test_nurbs_fitting_surface.cpp.