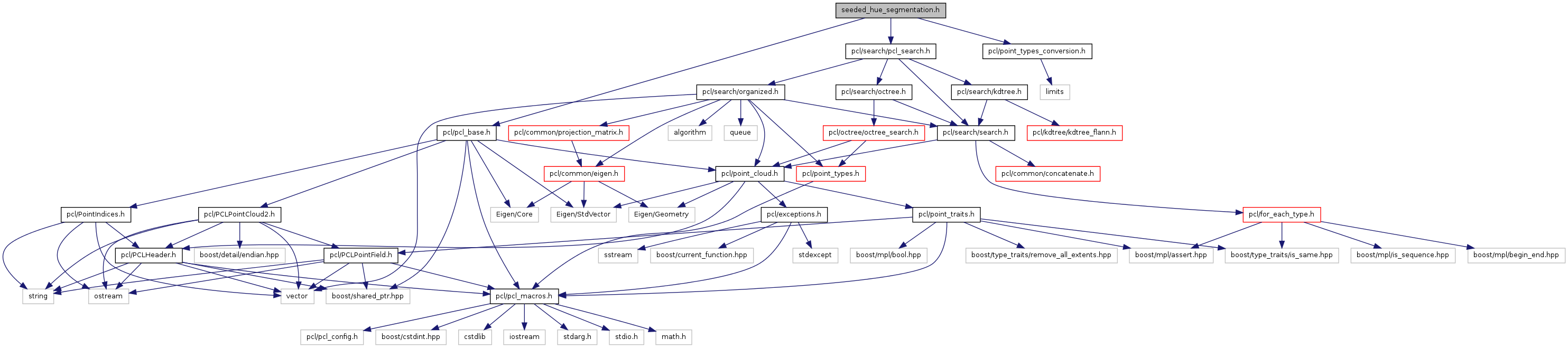
#include <pcl/pcl_base.h>#include <pcl/point_types_conversion.h>#include <pcl/search/pcl_search.h>
Include dependency graph for seeded_hue_segmentation.h:
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | pcl::SeededHueSegmentation |
| SeededHueSegmentation. More... | |
Namespaces | |
| namespace | pcl |
Functions | |
| void | pcl::seededHueSegmentation (const PointCloud< PointXYZRGB > &cloud, const boost::shared_ptr< search::Search< PointXYZRGB > > &tree, float tolerance, PointIndices &indices_in, PointIndices &indices_out, float delta_hue=0.0) |
| Decompose a region of space into clusters based on the Euclidean distance between points. | |
| void | pcl::seededHueSegmentation (const PointCloud< PointXYZRGB > &cloud, const boost::shared_ptr< search::Search< PointXYZRGBL > > &tree, float tolerance, PointIndices &indices_in, PointIndices &indices_out, float delta_hue=0.0) |
| Decompose a region of space into clusters based on the Euclidean distance between points. | |