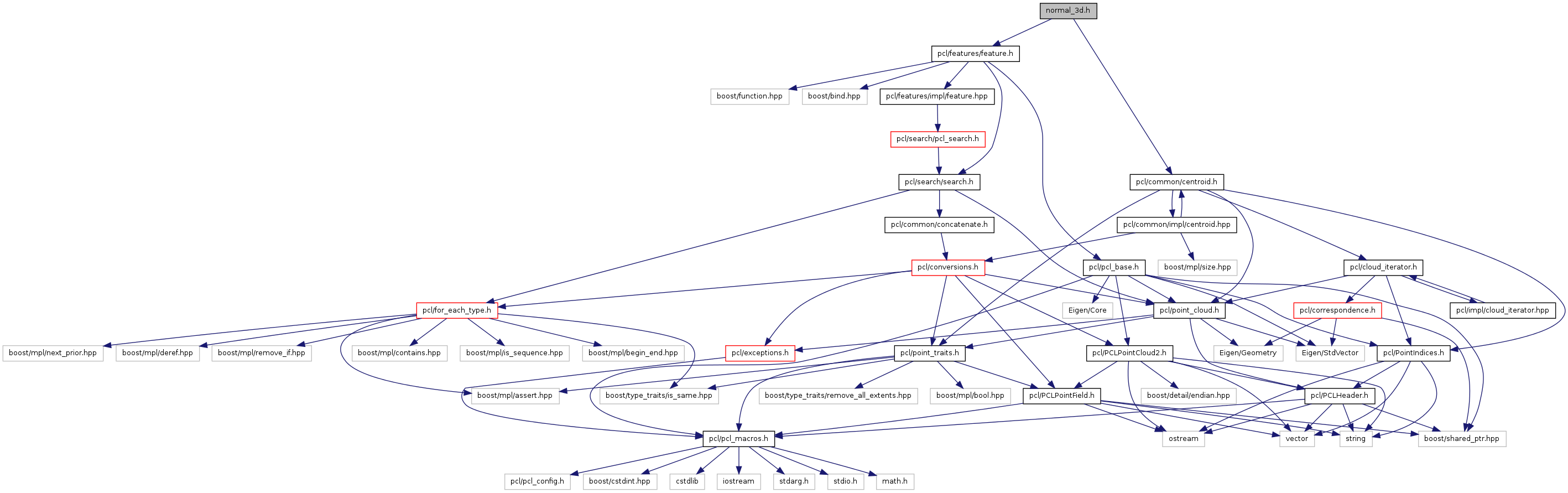
Include dependency graph for normal_3d.h:
Go to the source code of this file.
Classes | |
| class | pcl::NormalEstimation< PointInT, PointOutT > |
| NormalEstimation estimates local surface properties (surface normals and curvatures)at each 3D point. If PointOutT is specified as pcl::Normal, the normal is stored in the first 3 components (0-2), and the curvature is stored in component 3. More... | |
Namespaces | |
| namespace | pcl |
Functions | |
| template<typename PointT > | |
| void | pcl::computePointNormal (const pcl::PointCloud< PointT > &cloud, Eigen::Vector4f &plane_parameters, float &curvature) |
| Compute the Least-Squares plane fit for a given set of points, and return the estimated plane parameters together with the surface curvature. | |
| template<typename PointT > | |
| void | pcl::computePointNormal (const pcl::PointCloud< PointT > &cloud, const std::vector< int > &indices, Eigen::Vector4f &plane_parameters, float &curvature) |
| Compute the Least-Squares plane fit for a given set of points, using their indices, and return the estimated plane parameters together with the surface curvature. | |
| template<typename PointT , typename Scalar > | |
| void | pcl::flipNormalTowardsViewpoint (const PointT &point, float vp_x, float vp_y, float vp_z, Eigen::Matrix< Scalar, 4, 1 > &normal) |
| Flip (in place) the estimated normal of a point towards a given viewpoint. | |
| template<typename PointT , typename Scalar > | |
| void | pcl::flipNormalTowardsViewpoint (const PointT &point, float vp_x, float vp_y, float vp_z, Eigen::Matrix< Scalar, 3, 1 > &normal) |
| Flip (in place) the estimated normal of a point towards a given viewpoint. | |
| template<typename PointT > | |
| void | pcl::flipNormalTowardsViewpoint (const PointT &point, float vp_x, float vp_y, float vp_z, float &nx, float &ny, float &nz) |
| Flip (in place) the estimated normal of a point towards a given viewpoint. | |