#include <pcl/filters/filter.h>
Include dependency graph for fast_bilateral.h:

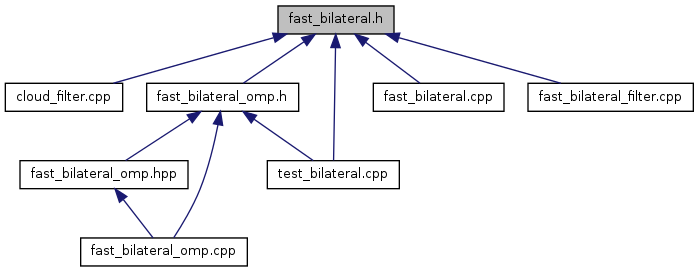
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | pcl::FastBilateralFilter< PointT >::Array3D |
| class | pcl::FastBilateralFilter< PointT > |
| Implementation of a fast bilateral filter for smoothing depth information in organized point clouds Based on the following paper: * Sylvain Paris and FrŽdo Durand "A Fast Approximation of the Bilateral Filter using a Signal Processing Approach" European Conference on Computer Vision (ECCV'06) More... | |
Namespaces | |
| namespace | pcl |
Defines | |
| #define | PCL_INSTANTIATE_FastBilateralFilter(T) template class PCL_EXPORTS pcl::FastBilateralFilter<T>; |
Define Documentation
| #define PCL_INSTANTIATE_FastBilateralFilter | ( | T | ) | template class PCL_EXPORTS pcl::FastBilateralFilter<T>; |
Definition at line 195 of file fast_bilateral.h.