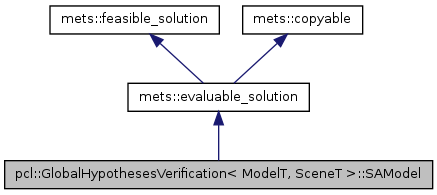
Inheritance diagram for pcl::GlobalHypothesesVerification< ModelT, SceneT >::SAModel:
Public Member Functions | |
| void | apply (int, bool) |
| mets::gol_type | apply_and_evaluate (int index, bool val) |
| void | copy_from (const mets::copyable &o) |
| mets::gol_type | cost_function () const |
| Cost function to be minimized. | |
| void | setOptimizer (SAOptimizerT *opt) |
| void | setSolution (std::vector< bool > &sol) |
| void | unapply (int index, bool val) |
| mets::gol_type | what_if (int, bool) const |
Public Attributes | |
| mets::gol_type | cost_ |
| SAOptimizerT * | opt_ |
| std::vector< bool > | solution_ |
Detailed Description
template<typename ModelT, typename SceneT>
class pcl::GlobalHypothesesVerification< ModelT, SceneT >::SAModel
Member Function Documentation
template<typename ModelT , typename SceneT >
| void pcl::GlobalHypothesesVerification< ModelT, SceneT >::SAModel::apply | ( | int | , |
| bool | |||
| ) | [inline] |
template<typename ModelT , typename SceneT >
| mets::gol_type pcl::GlobalHypothesesVerification< ModelT, SceneT >::SAModel::apply_and_evaluate | ( | int | index, |
| bool | val | ||
| ) | [inline] |
template<typename ModelT , typename SceneT >
| void pcl::GlobalHypothesesVerification< ModelT, SceneT >::SAModel::copy_from | ( | const mets::copyable & | o | ) | [inline, virtual] |
Implements mets::copyable.
template<typename ModelT , typename SceneT >
| mets::gol_type pcl::GlobalHypothesesVerification< ModelT, SceneT >::SAModel::cost_function | ( | ) | const [inline, virtual] |
Cost function to be minimized.
The cost function is the target that the search algorithm tries to minimize.
You must implement this for your problem.
Implements mets::evaluable_solution.
template<typename ModelT , typename SceneT >
| void pcl::GlobalHypothesesVerification< ModelT, SceneT >::SAModel::setOptimizer | ( | SAOptimizerT * | opt | ) | [inline] |
template<typename ModelT , typename SceneT >
| void pcl::GlobalHypothesesVerification< ModelT, SceneT >::SAModel::setSolution | ( | std::vector< bool > & | sol | ) | [inline] |
template<typename ModelT , typename SceneT >
| void pcl::GlobalHypothesesVerification< ModelT, SceneT >::SAModel::unapply | ( | int | index, |
| bool | val | ||
| ) | [inline] |
template<typename ModelT , typename SceneT >
| mets::gol_type pcl::GlobalHypothesesVerification< ModelT, SceneT >::SAModel::what_if | ( | int | , |
| bool | |||
| ) | const [inline] |
Member Data Documentation
template<typename ModelT , typename SceneT >
| mets::gol_type pcl::GlobalHypothesesVerification< ModelT, SceneT >::SAModel::cost_ |
template<typename ModelT , typename SceneT >
| SAOptimizerT* pcl::GlobalHypothesesVerification< ModelT, SceneT >::SAModel::opt_ |
template<typename ModelT , typename SceneT >
| std::vector<bool> pcl::GlobalHypothesesVerification< ModelT, SceneT >::SAModel::solution_ |
The documentation for this class was generated from the following file: