#include <moveit/pick_place/manipulation_stage.h>#include <boost/thread.hpp>#include <boost/shared_ptr.hpp>#include <boost/function.hpp>#include <vector>#include <deque>
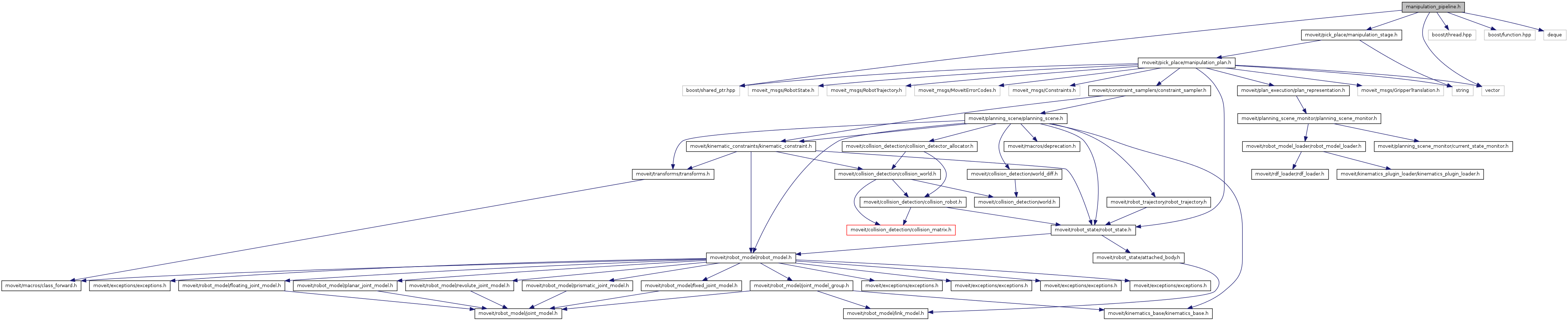
Include dependency graph for manipulation_pipeline.h:
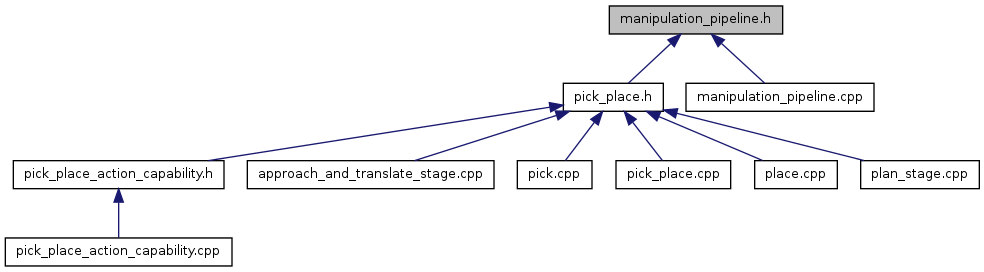
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | pick_place::ManipulationPipeline |
| Represent the sequence of steps that are executed for a manipulation plan. More... | |
Namespaces | |
| namespace | pick_place |