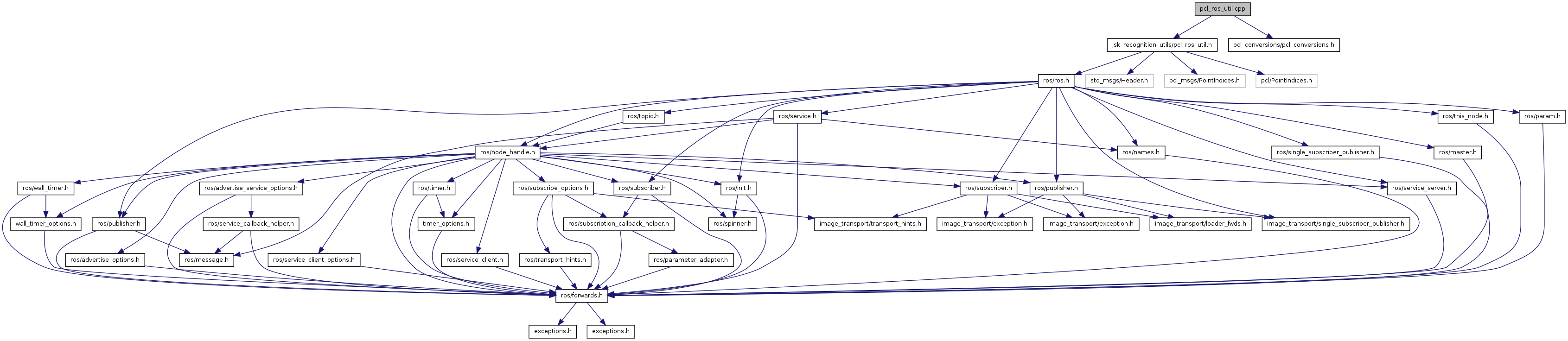
Include dependency graph for pcl_ros_util.cpp:
Go to the source code of this file.
Namespaces | |
| namespace | jsk_recognition_utils |
Functions | |
| void | jsk_recognition_utils::publishPointIndices (ros::Publisher &pub, const pcl::PointIndices &indices, const std_msgs::Header &header) |
| Convert pcl::PointIndices to pcl_msgs::PointIndices and publish it with overriding header. | |