#include <industrial_extrinsic_cal/camera_observer.hpp>#include <industrial_extrinsic_cal/basic_types.h>#include <iostream>#include <sstream>#include <time.h>#include <stdio.h>#include <opencv2/core/core.hpp>#include <opencv2/imgproc/imgproc.hpp>#include <opencv2/calib3d/calib3d.hpp>#include <opencv2/highgui/highgui.hpp>#include <cv_bridge/cv_bridge.h>#include <image_transport/image_transport.h>#include <ros/ros.h>#include <sensor_msgs/Image.h>#include <sensor_msgs/CameraInfo.h>#include <geometry_msgs/PointStamped.h>
Include dependency graph for ros_camera_observer.h:

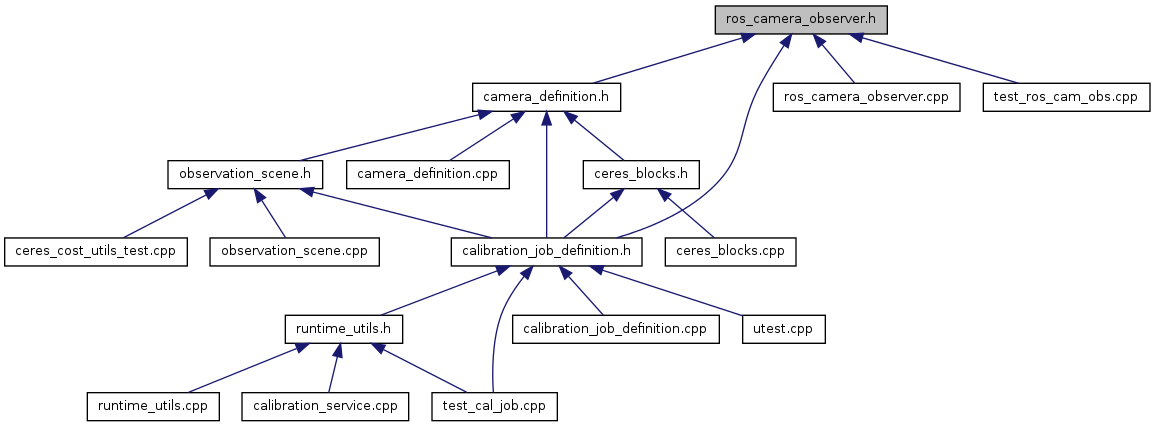
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | industrial_extrinsic_cal::ROSCameraObserver |
Namespaces | |
| namespace | industrial_extrinsic_cal |
| namespace | pattern_options |
enumerator containing three options for the type of pattern to detect | |
Typedefs | |
| typedef pattern_options::pattern_options_ | PatternOption |
Enumerations | |
| enum | pattern_options::pattern_options_ { pattern_options::Chessboard = 0, pattern_options::CircleGrid = 1, pattern_options::ARtag = 2 } |
Typedef Documentation
Definition at line 53 of file ros_camera_observer.h.