#include <feature_container.h>
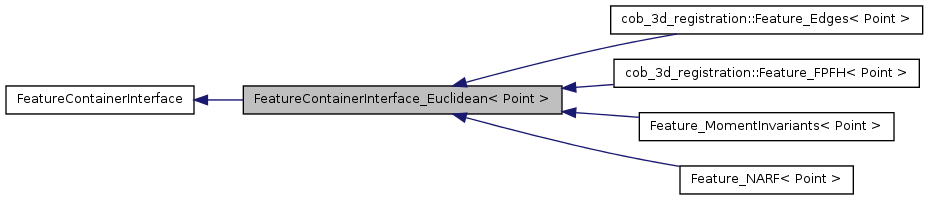
Inheritance diagram for FeatureContainerInterface_Euclidean< Point >:
Public Member Functions | |
| virtual void | build (const pcl::PointCloud< Point > &src, const pcl::PointCloud< Point > &tgt) |
| FeatureContainerInterface_Euclidean () | |
| virtual void | findFeatureCorrespondences (int index, std::vector< int > &correspondence_indices, std::vector< float > &distances) |
| virtual Eigen::VectorXf | getFeatureIn (const int)=0 |
| virtual Eigen::VectorXf | getFeatureOut (const int)=0 |
| virtual bool | hidden_build ()=0 |
| virtual bool | isValid () |
| void | setSearchRadius (float v) |
Protected Attributes | |
| bool | build_ |
| pcl::PointCloud< Point > | org_in_ |
| pcl::PointCloud< Point > | org_out_ |
| float | radius2_ |
| boost::shared_ptr< pcl::KdTree < Point > > | tree_ |
Detailed Description
template<typename Point>
class FeatureContainerInterface_Euclidean< Point >
Definition at line 189 of file feature_container.h.
Constructor & Destructor Documentation
template<typename Point >
| FeatureContainerInterface_Euclidean< Point >::FeatureContainerInterface_Euclidean | ( | ) | [inline] |
Definition at line 202 of file feature_container.h.
Member Function Documentation
template<typename Point >
| virtual void FeatureContainerInterface_Euclidean< Point >::build | ( | const pcl::PointCloud< Point > & | src, |
| const pcl::PointCloud< Point > & | tgt | ||
| ) | [inline, virtual] |
Definition at line 209 of file feature_container.h.
template<typename Point >
| virtual void FeatureContainerInterface_Euclidean< Point >::findFeatureCorrespondences | ( | int | index, |
| std::vector< int > & | correspondence_indices, | ||
| std::vector< float > & | distances | ||
| ) | [inline, virtual] |
Implements FeatureContainerInterface.
Definition at line 224 of file feature_container.h.
template<typename Point >
| virtual Eigen::VectorXf FeatureContainerInterface_Euclidean< Point >::getFeatureIn | ( | const int | ) | [pure virtual] |
template<typename Point >
| virtual Eigen::VectorXf FeatureContainerInterface_Euclidean< Point >::getFeatureOut | ( | const int | ) | [pure virtual] |
template<typename Point >
| virtual bool FeatureContainerInterface_Euclidean< Point >::hidden_build | ( | ) | [pure virtual] |
template<typename Point >
| virtual bool FeatureContainerInterface_Euclidean< Point >::isValid | ( | ) | [inline, virtual] |
Implements FeatureContainerInterface.
Definition at line 223 of file feature_container.h.
template<typename Point >
| void FeatureContainerInterface_Euclidean< Point >::setSearchRadius | ( | float | v | ) | [inline] |
Definition at line 207 of file feature_container.h.
Member Data Documentation
template<typename Point >
bool FeatureContainerInterface_Euclidean< Point >::build_ [protected] |
Definition at line 192 of file feature_container.h.
template<typename Point >
pcl::PointCloud<Point> FeatureContainerInterface_Euclidean< Point >::org_in_ [protected] |
Definition at line 194 of file feature_container.h.
template<typename Point >
pcl::PointCloud<Point> FeatureContainerInterface_Euclidean< Point >::org_out_ [protected] |
Definition at line 194 of file feature_container.h.
template<typename Point >
float FeatureContainerInterface_Euclidean< Point >::radius2_ [protected] |
Definition at line 193 of file feature_container.h.
template<typename Point >
boost::shared_ptr<pcl::KdTree<Point> > FeatureContainerInterface_Euclidean< Point >::tree_ [protected] |
Definition at line 198 of file feature_container.h.
The documentation for this class was generated from the following file: